.png)

- Source: Zoox (Youtube)
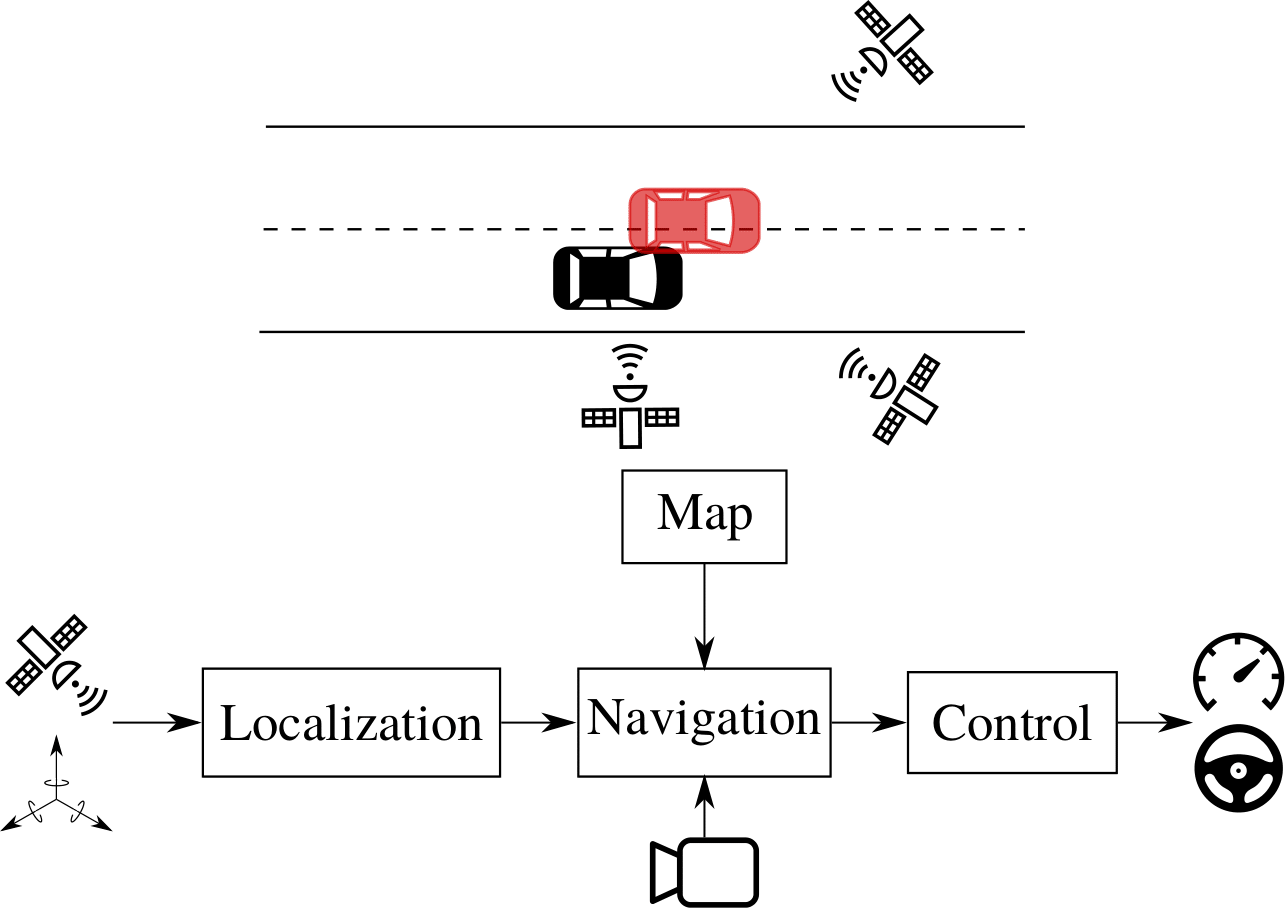
Localization for AD
Localization for AD
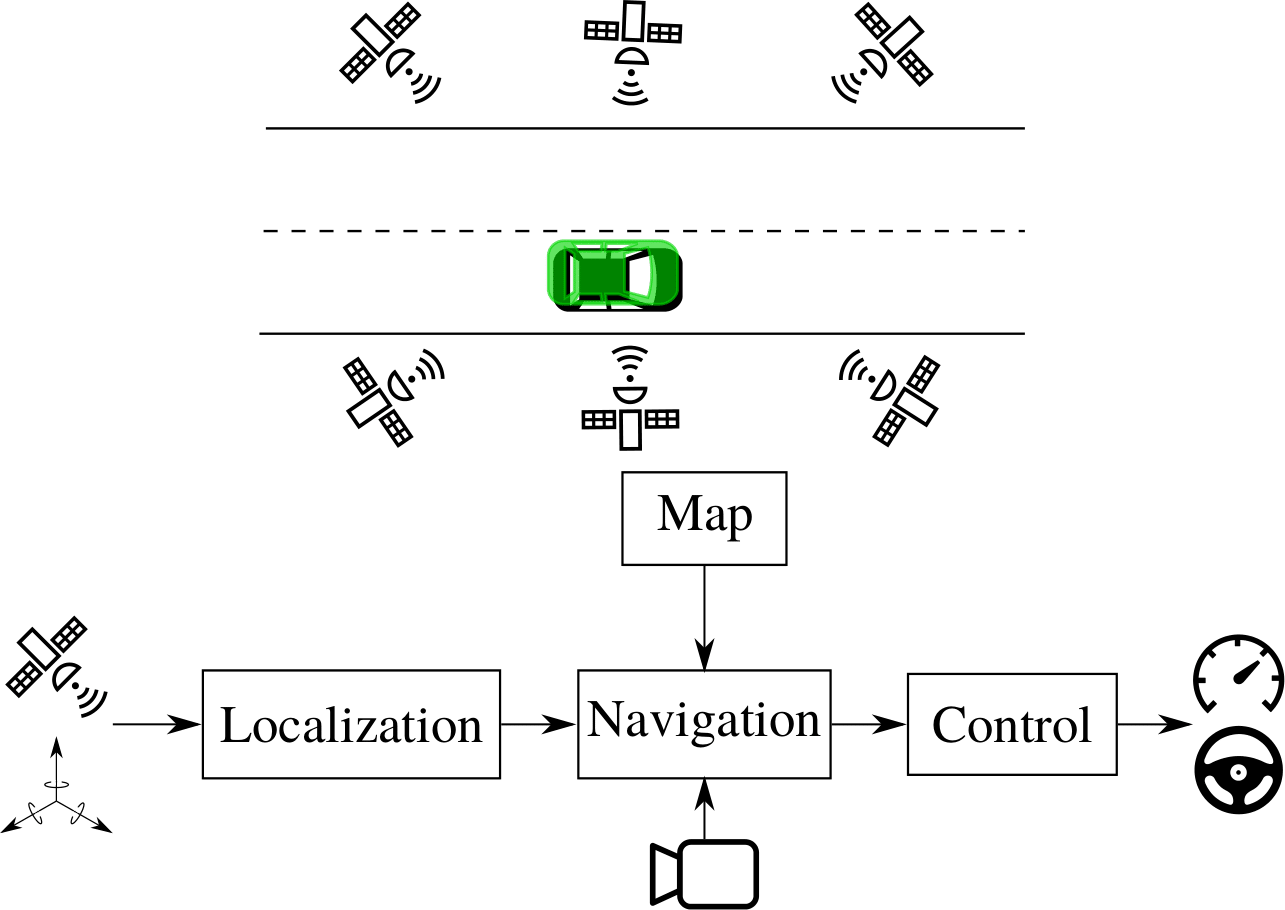
Localization for AD
HD Maps for localization
- Dense maps
- 👍 High detail
- 👎 High storage, limited scalability, sensor-specific
- Vector maps
- 👍 Lightweight, sensor agnostic
- 👎 low detail
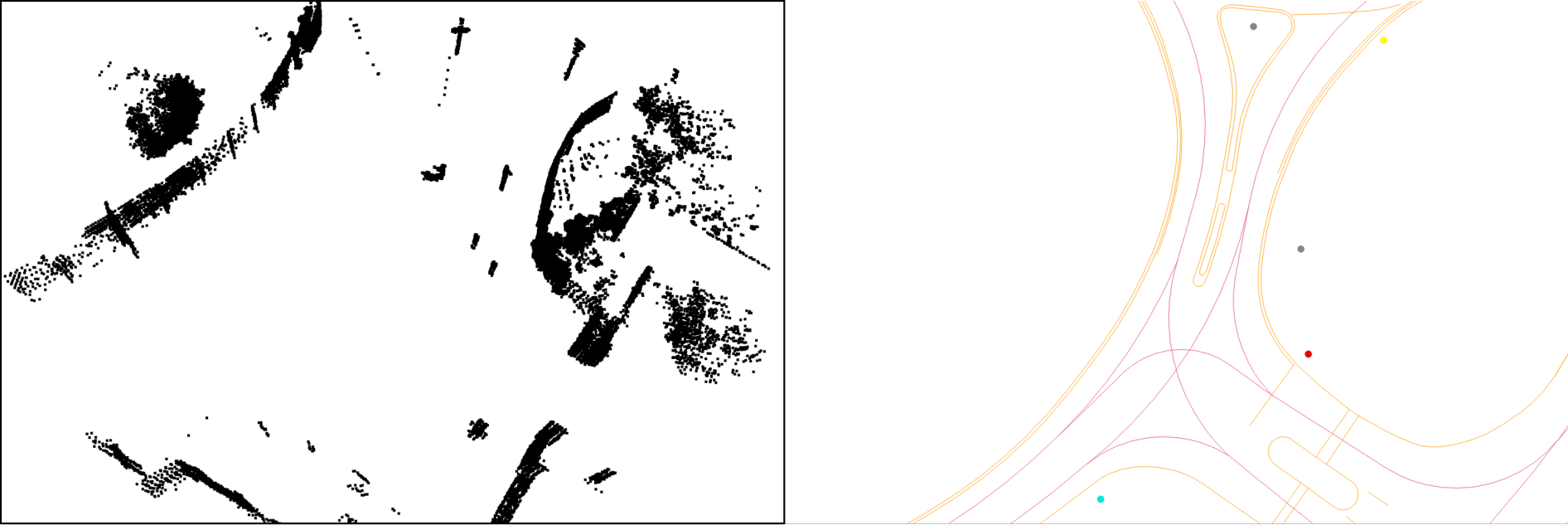
Compiegne HD Map
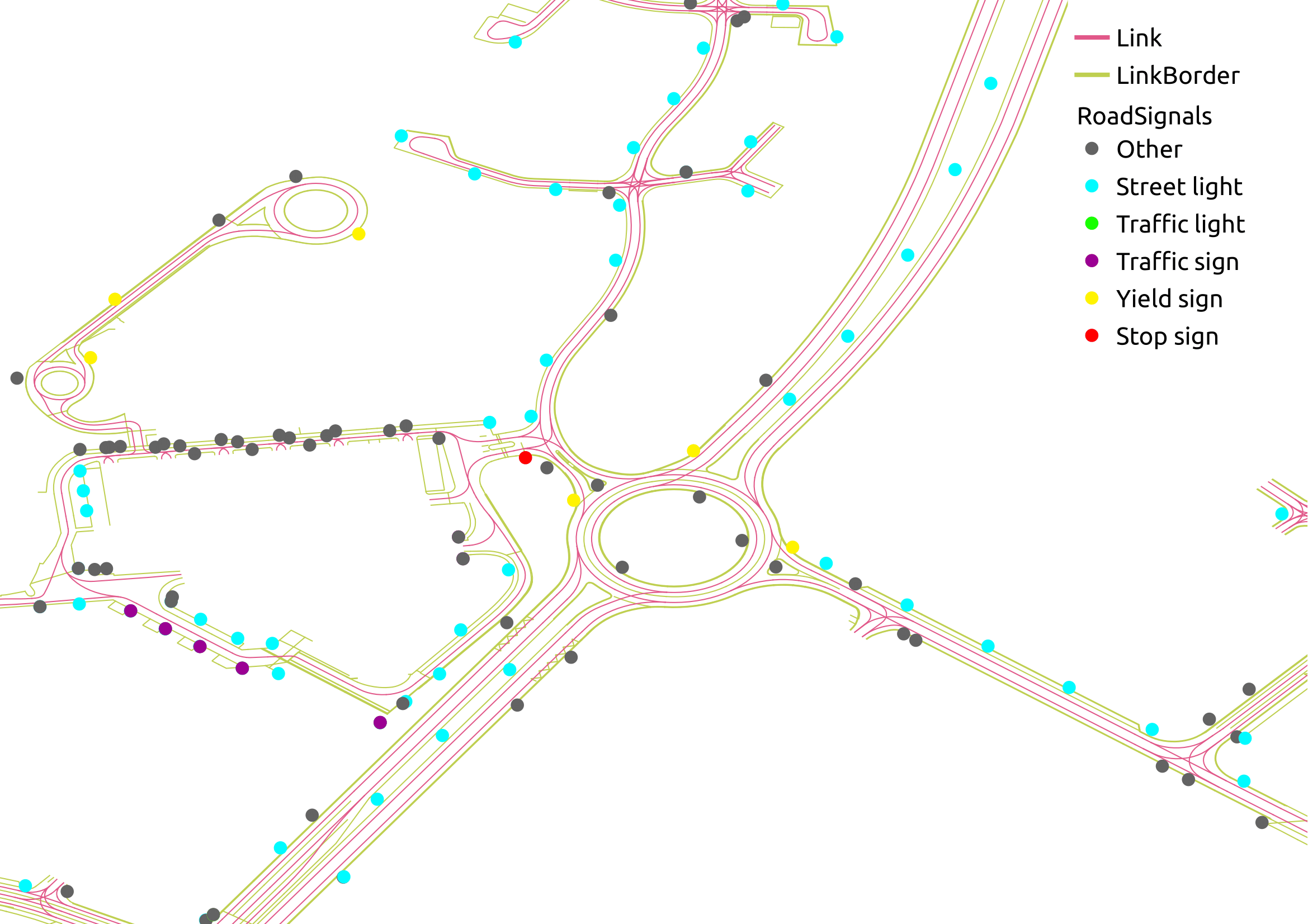
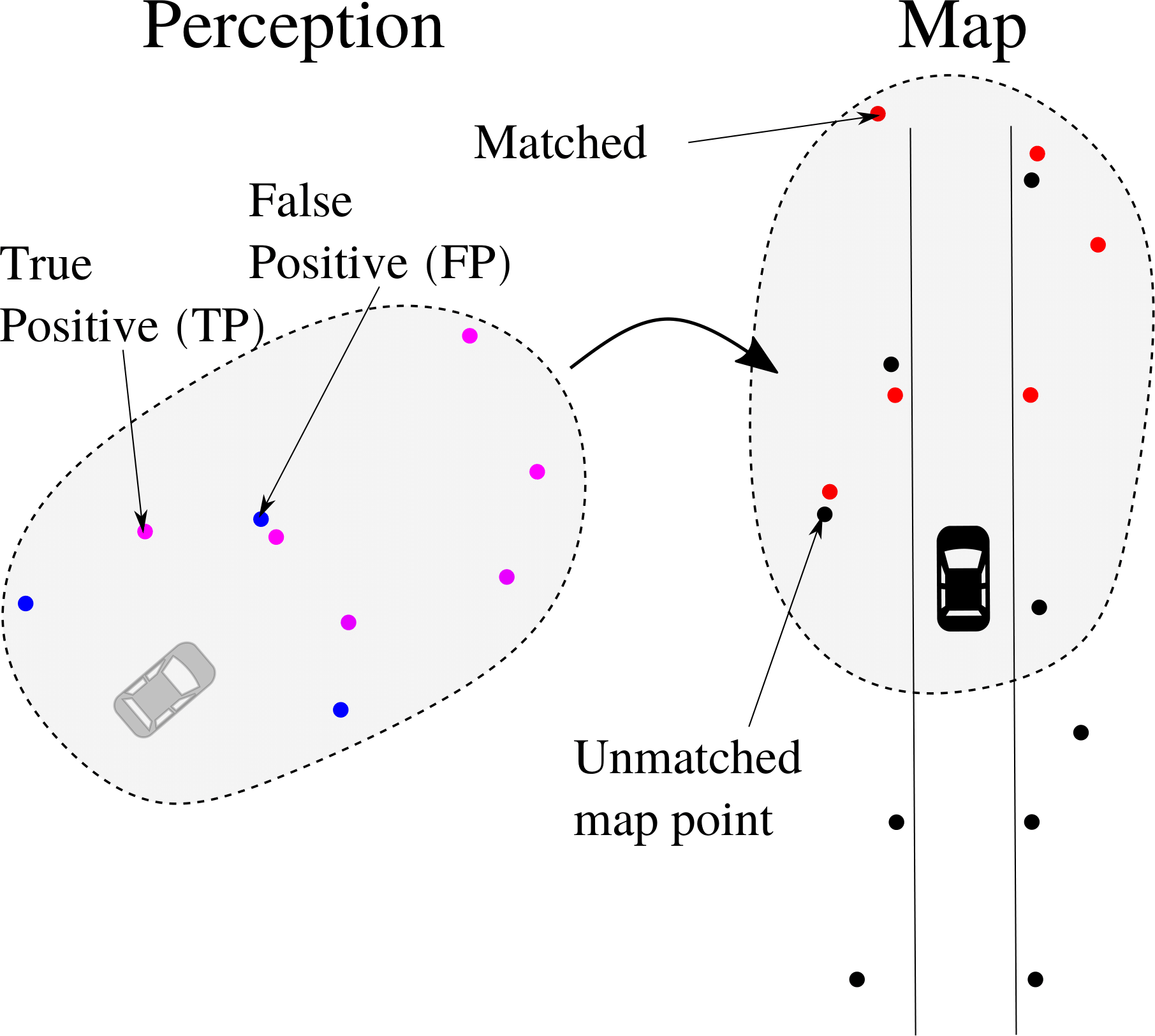
Localization with vector maps
Indiscernible features ⇒ Data association
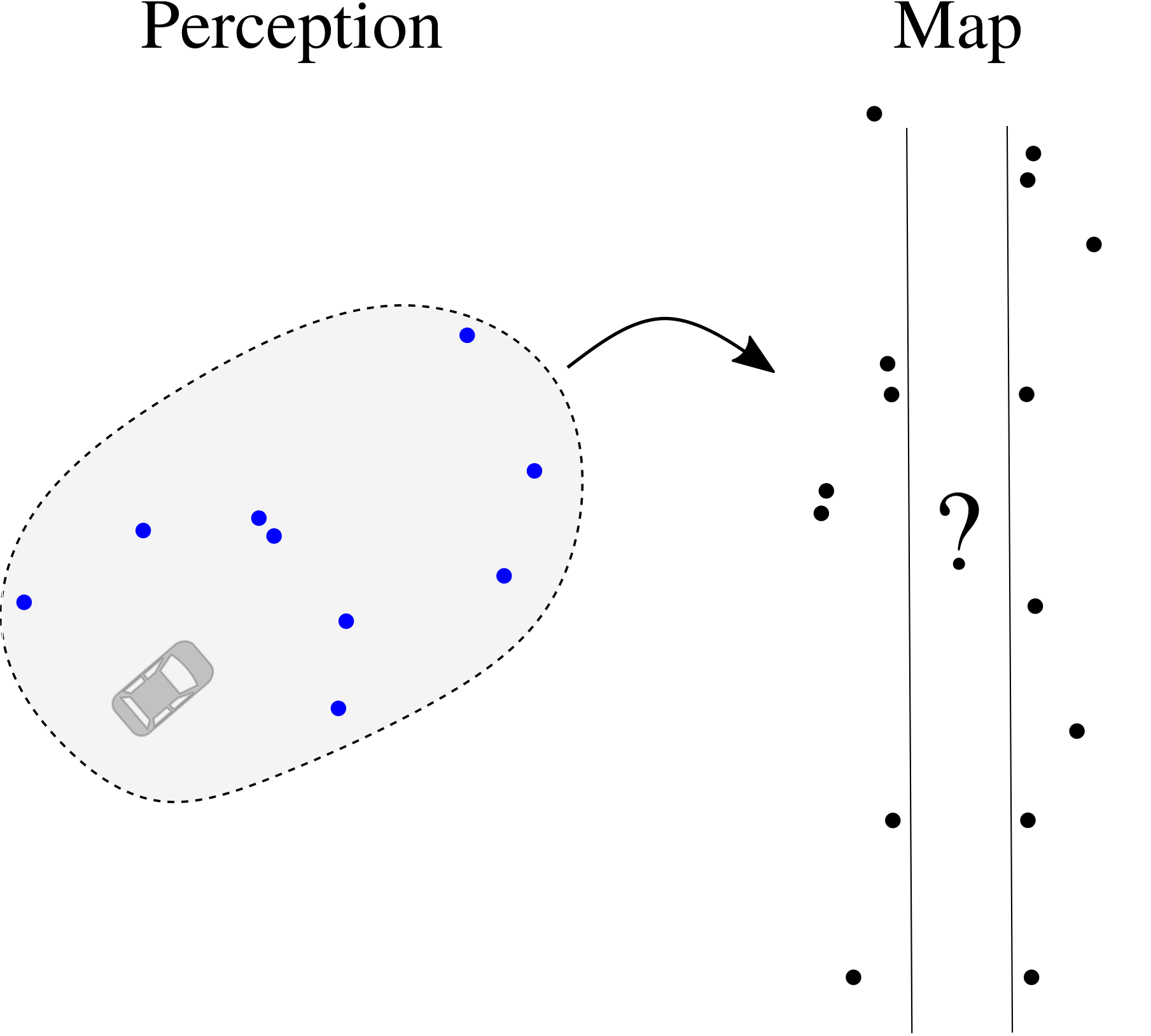
Indiscernible features ⇒ Data association
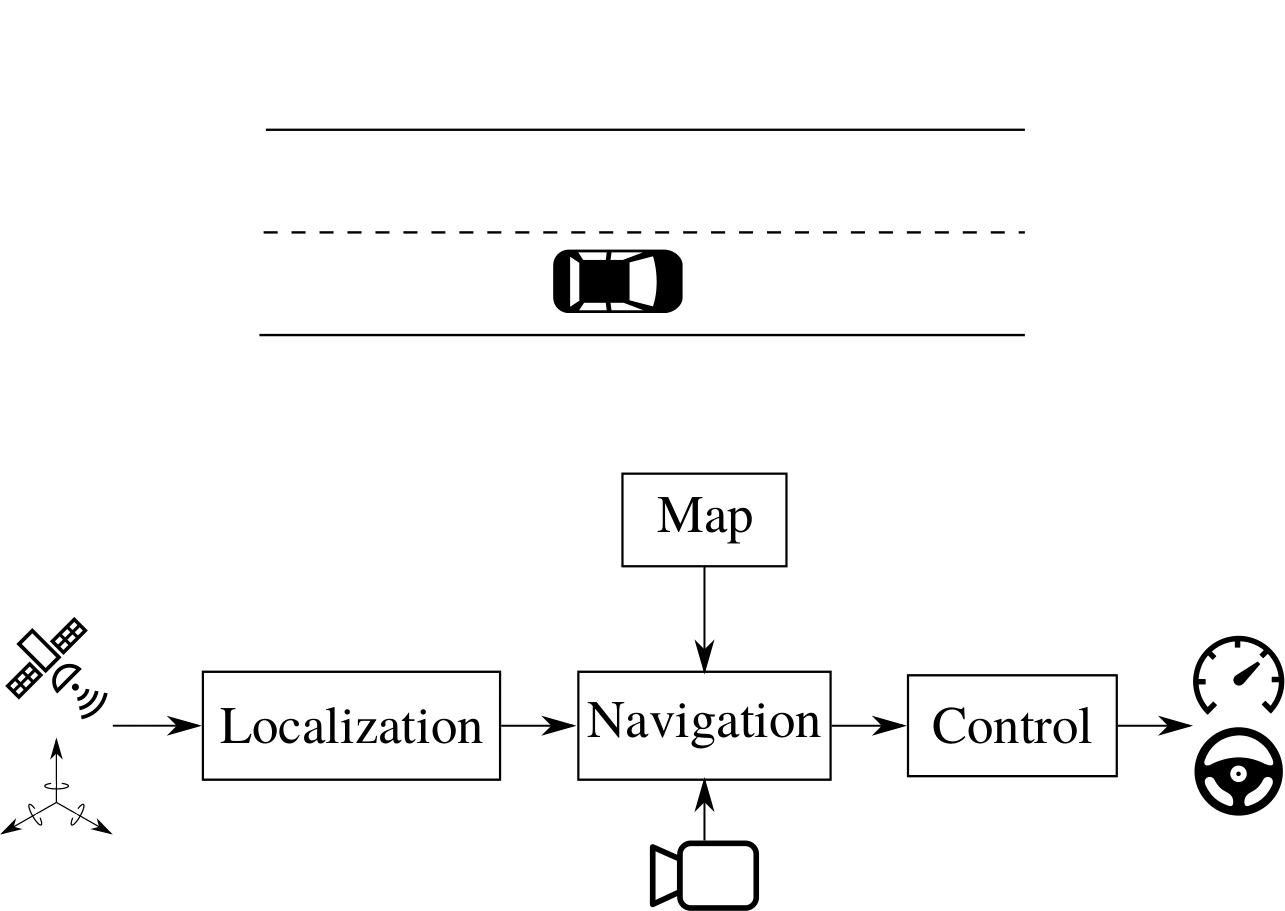
Studied AD pipeline
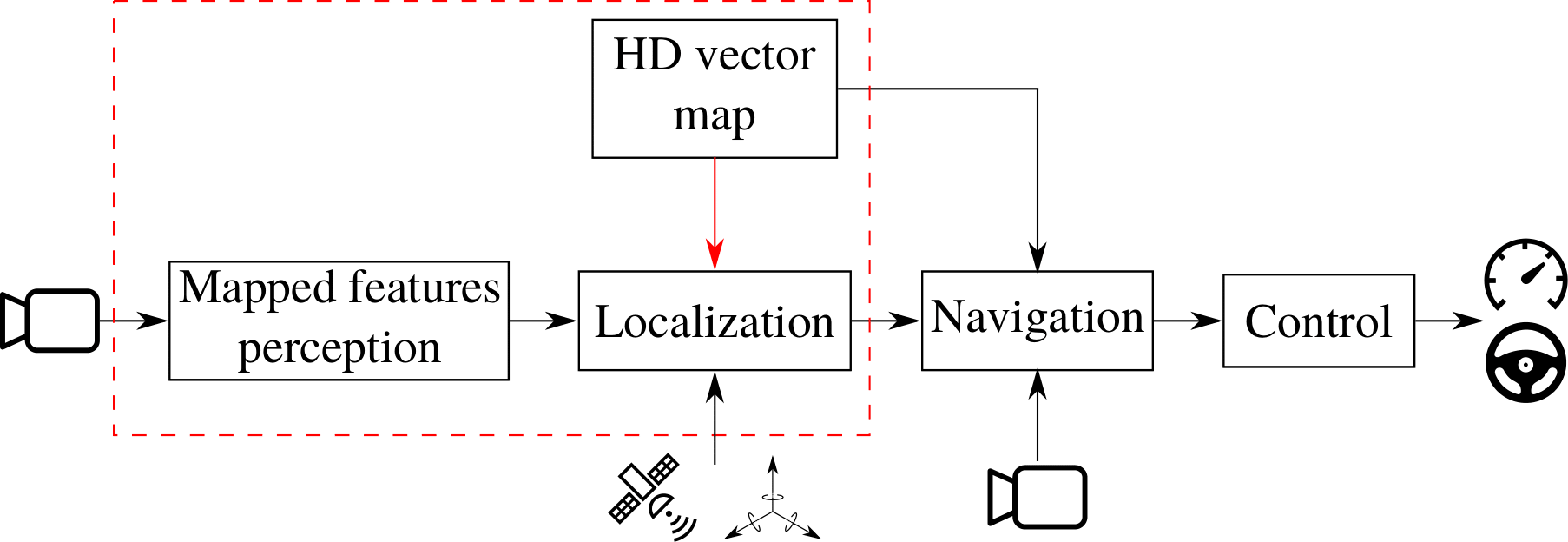
Mapped features detection

Geometric approaches
- 👍 Limited data needed
- 👎 Expert tuning
- 👎 Missdetections, false positives (trunks, corners, …)
Machine learning
- 👍 Better performance
- 👍 Less tuning, better genericity
- 👎 Huge amount of data needed
- 👎 Labelling
Case study: poles for localization
- Map for localization
- Maximize map usage -> poles common in road environments
- Minimize risks of false detections -> map-specific detection
- Machine learning for detection
- Minimize or avoid human labelling
- Leverage maps for automatic annotation
- Multi-sensor post-processing for automatic annotation
- Training with automatic annotations
- Uncertainty handling
- Minimize or avoid human labelling
- Localization using trained detectors without human input
Map-aided annotation
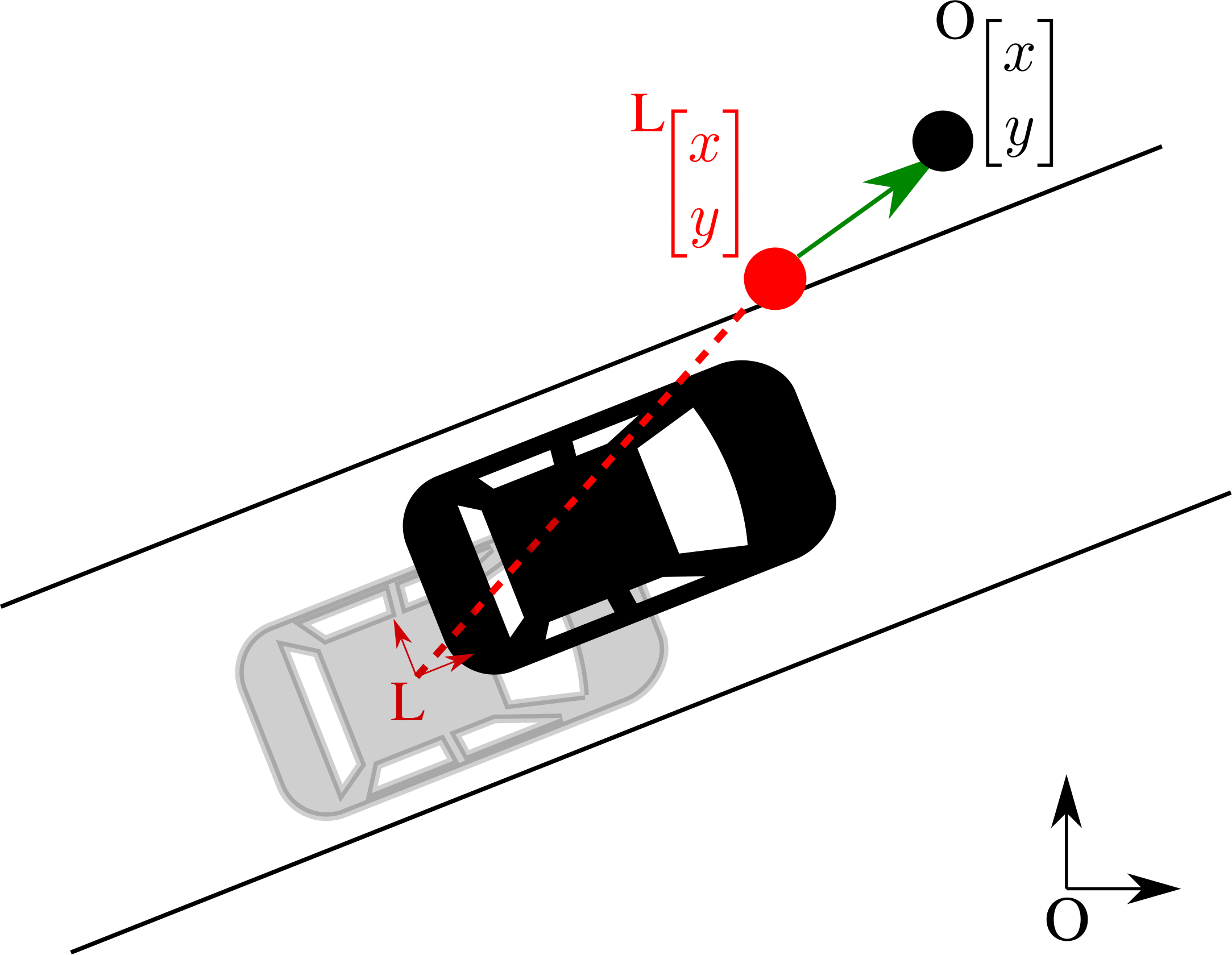
2D map projection with localization reference
 Naive projection
Naive projection
 Projection error source
Projection error source
Lidar refinement
 Ground estimation and annotation projection
Ground estimation and annotation projection
 Occluded pole bases removal
Occluded pole bases removal
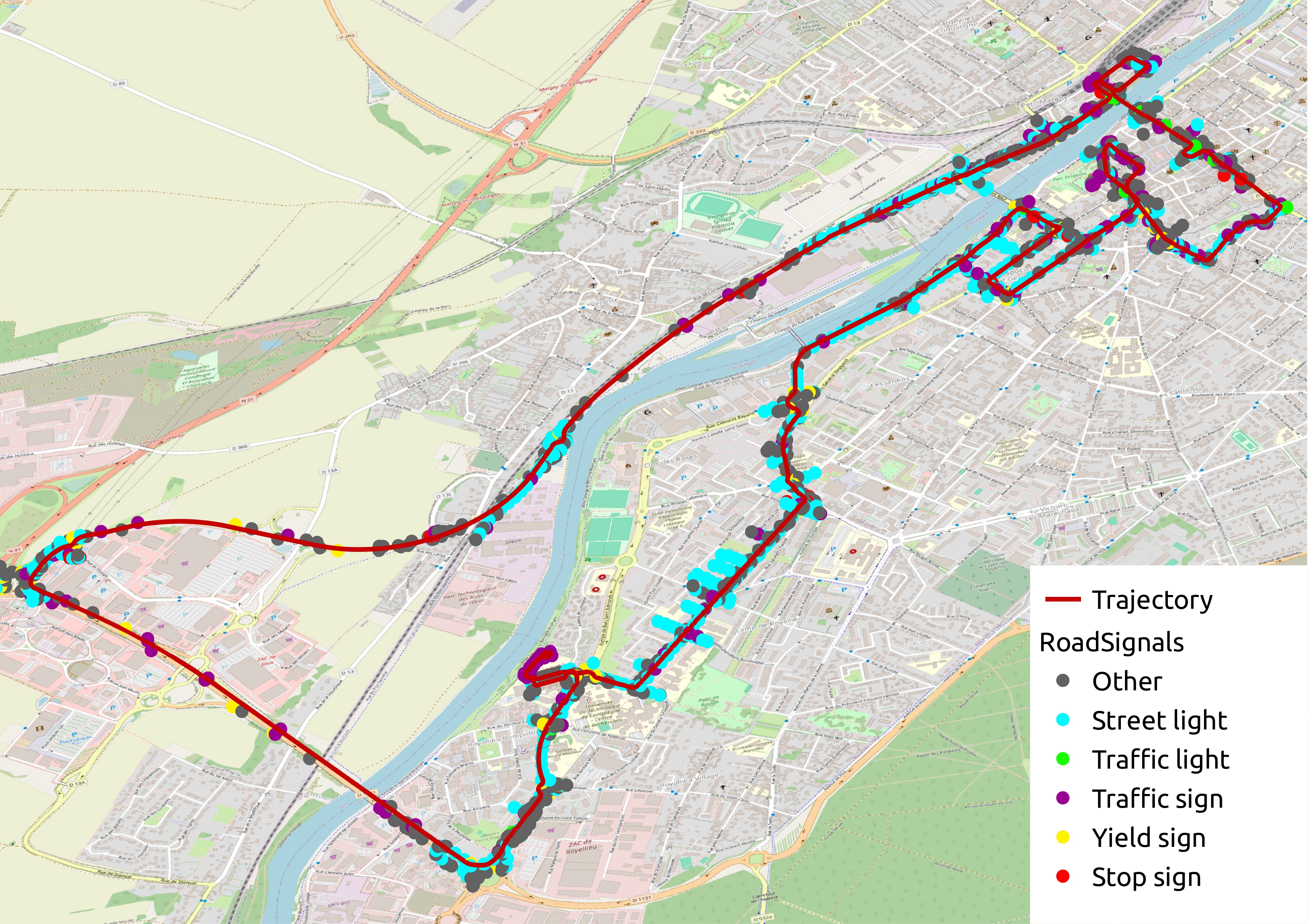
Dataset and evaluation metrics
- Multiple sequences around Compiegne
- 2,830 images manually annotated
- 9,017 poles
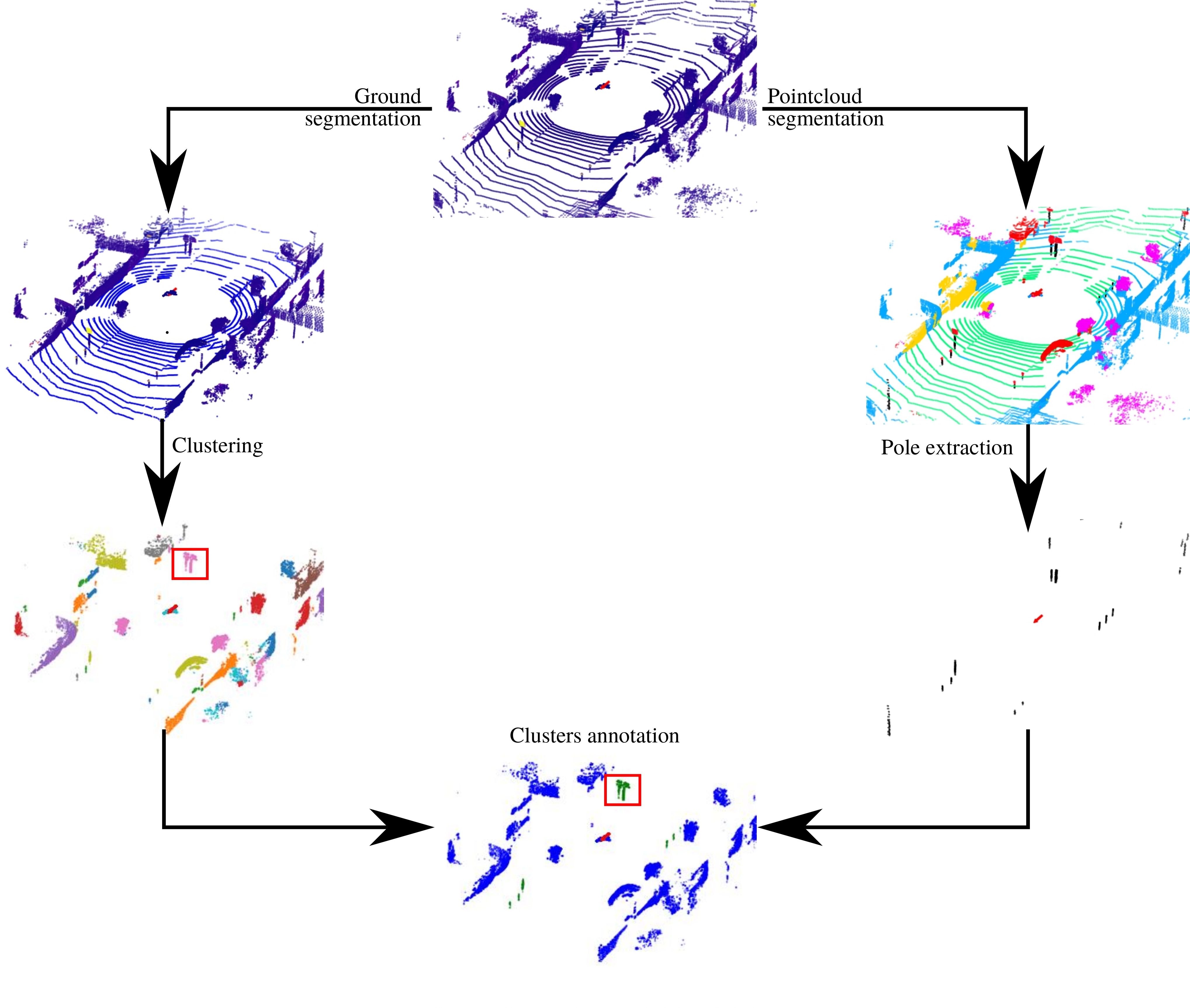
Multi-modal annotation
Lidar-based annotation
 Initial image
Initial image
 Corresponding point cloud
Corresponding point cloud
Lidar-based annotation
 Pointcloud segmentation
Pointcloud segmentation
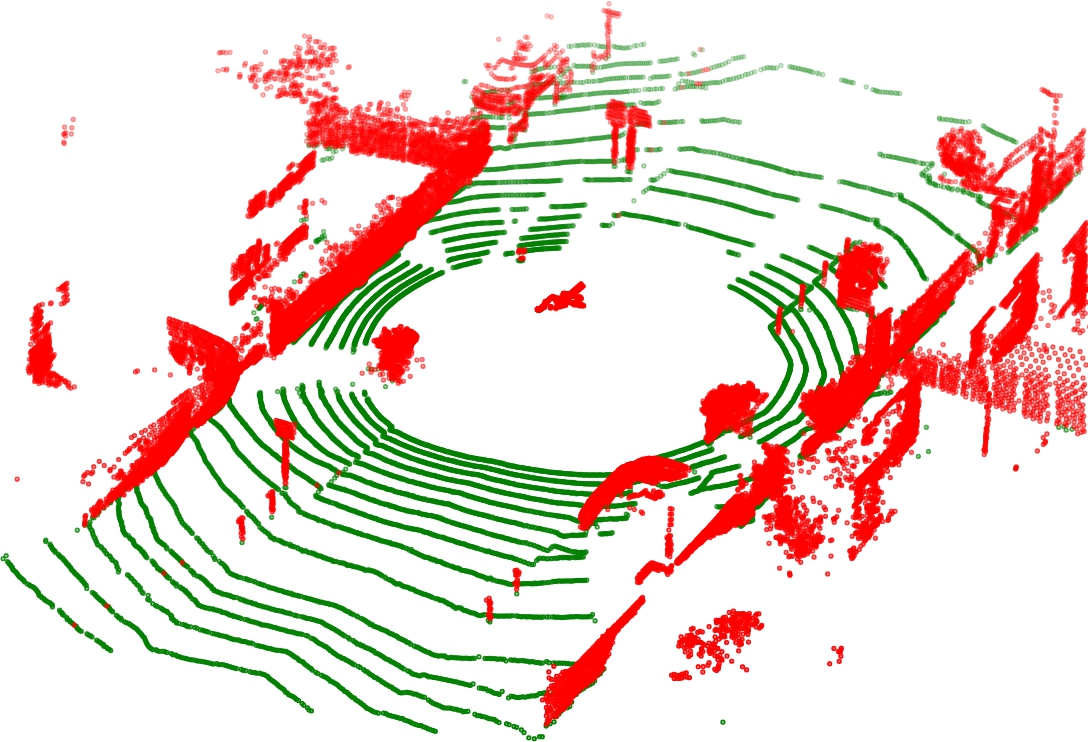 Ground segmentation (more precise)
Ground segmentation (more precise)
X. Zhu et al., “Cylindrical and asymmetrical 3d convolution networks for lidar segmentation”. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 2021.
Segmentation-based annotation
Initial image
 Segmentation mask
Segmentation mask
J. Wang et al., “Deep High-Resolution Representation Learning for Visual Recognition,” In IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 43, no. 10, pp. 3349-3364, 1 Oct. 2021.
Segmentation-based annotation
 Ground mask
Ground mask
 Ground + pole bases mask
Ground + pole bases mask
J. Wang et al., “Deep High-Resolution Representation Learning for Visual Recognition,” In IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 43, no. 10, pp. 3349-3364, 1 Oct. 2021.
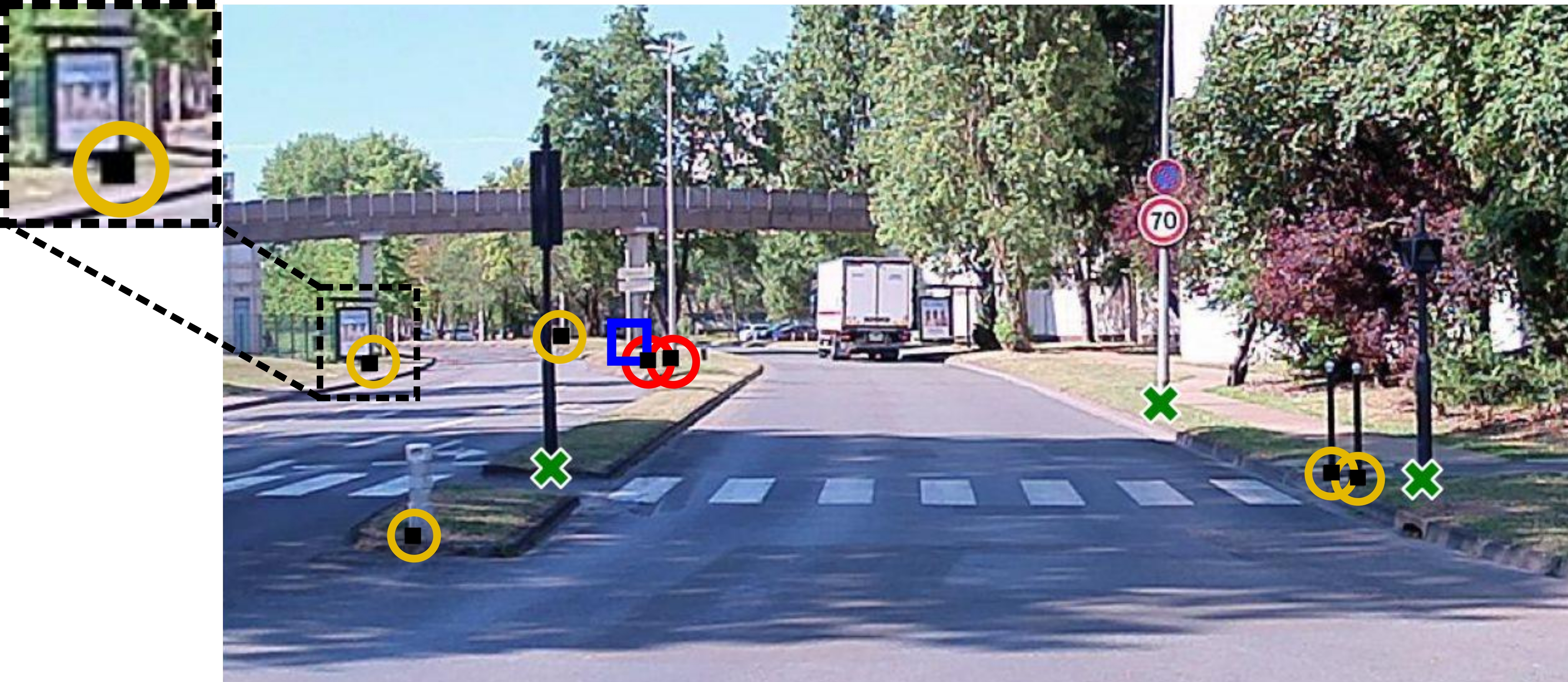
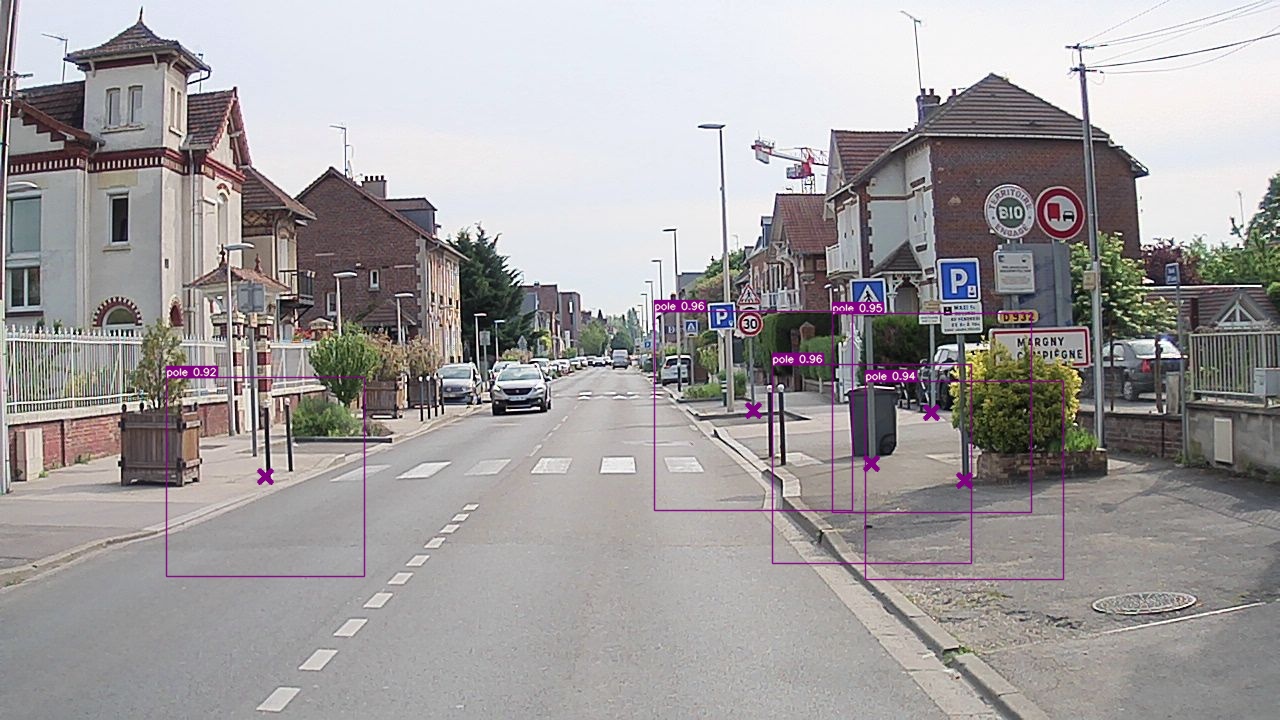
Pole base detection for cameras
- Pole base detection using object detection
- Based on YOLOv7 network
- Bounding box = visual context
- Automatic annotation: Prone to errors (missed objects, false positives)


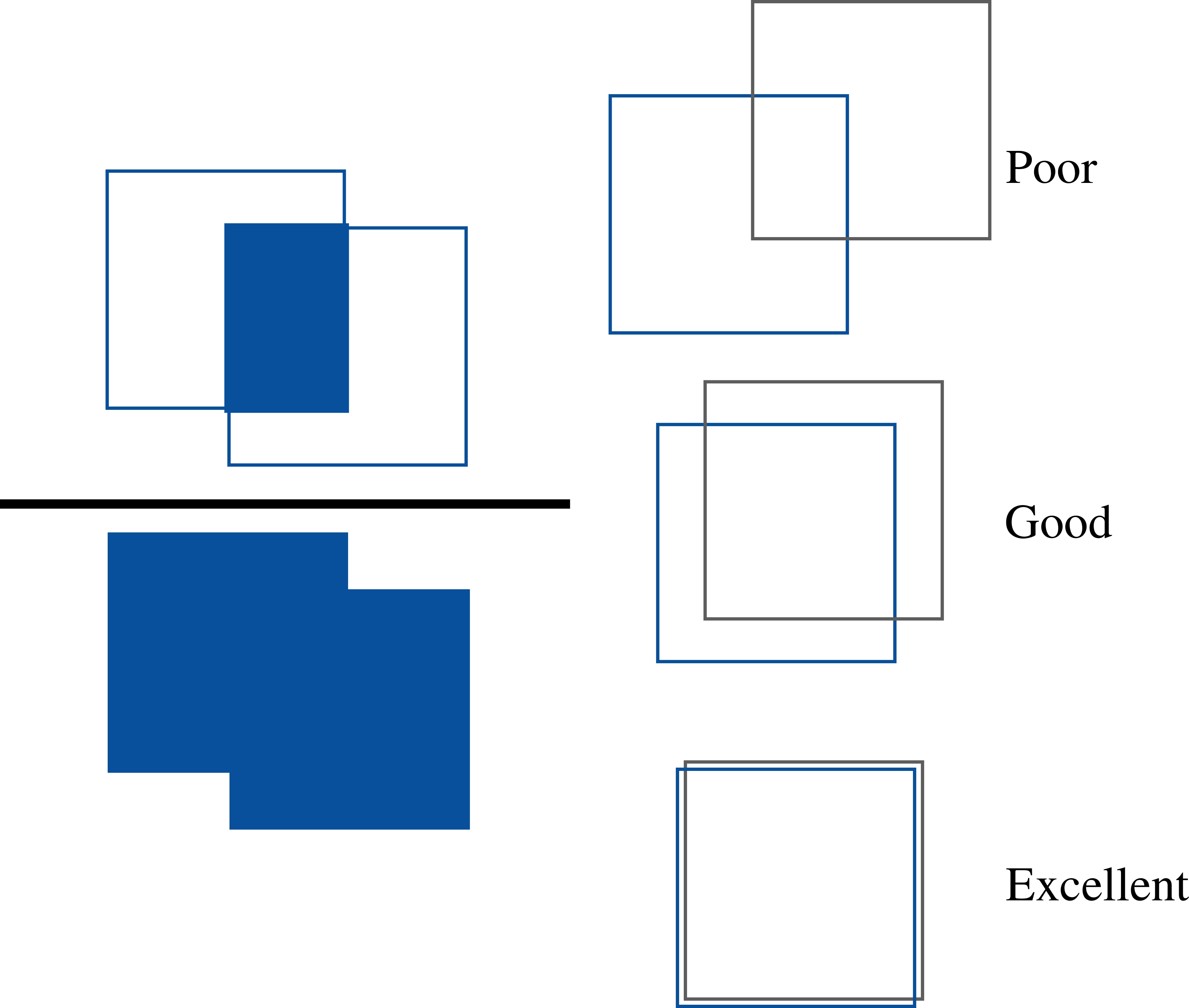
Evaluation metrics
- Precision, Recall
- Intersection-over-Union (IoU)
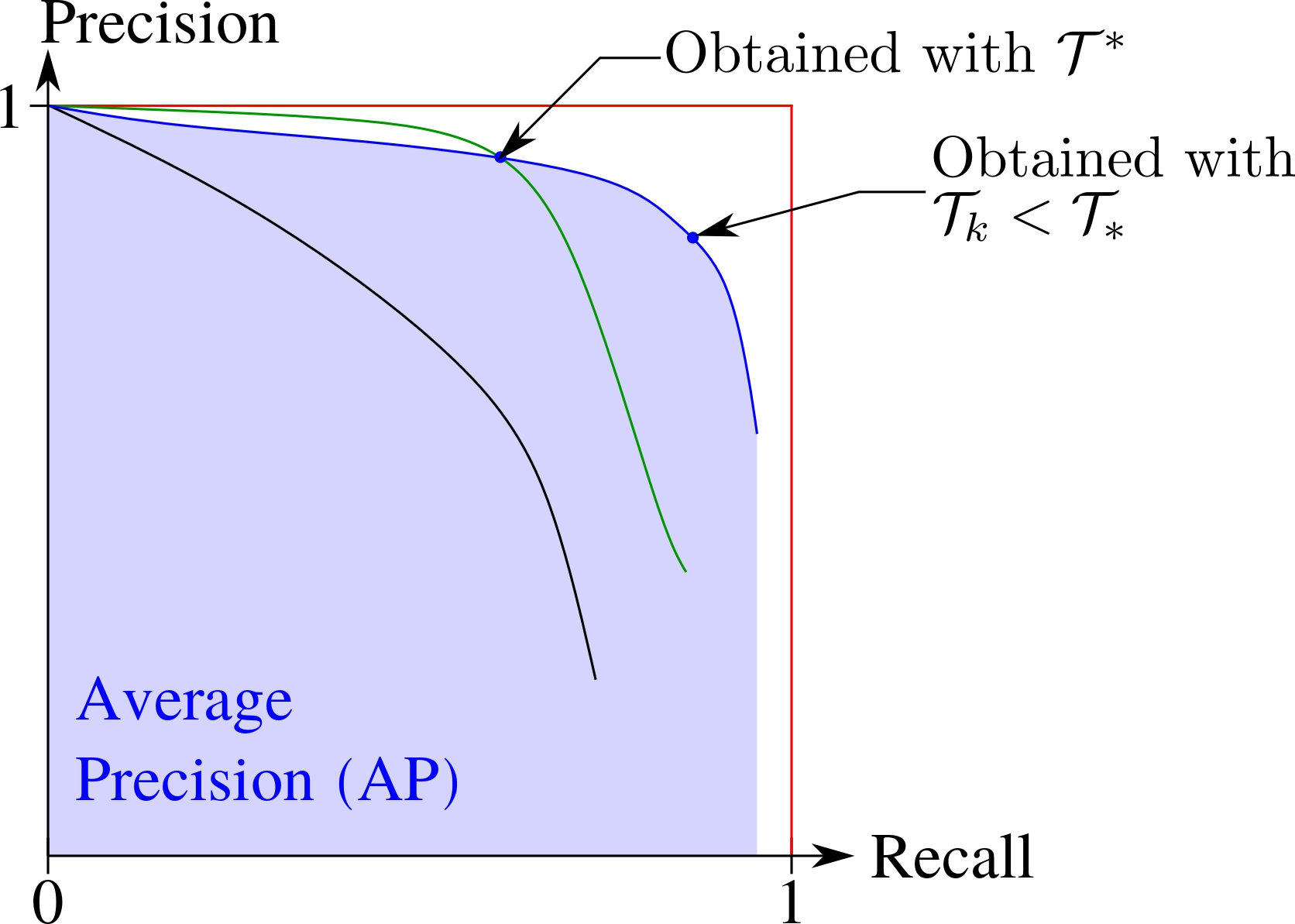
- Average Precision
- Mean horizontal Absolute positioning Error: MAE-x
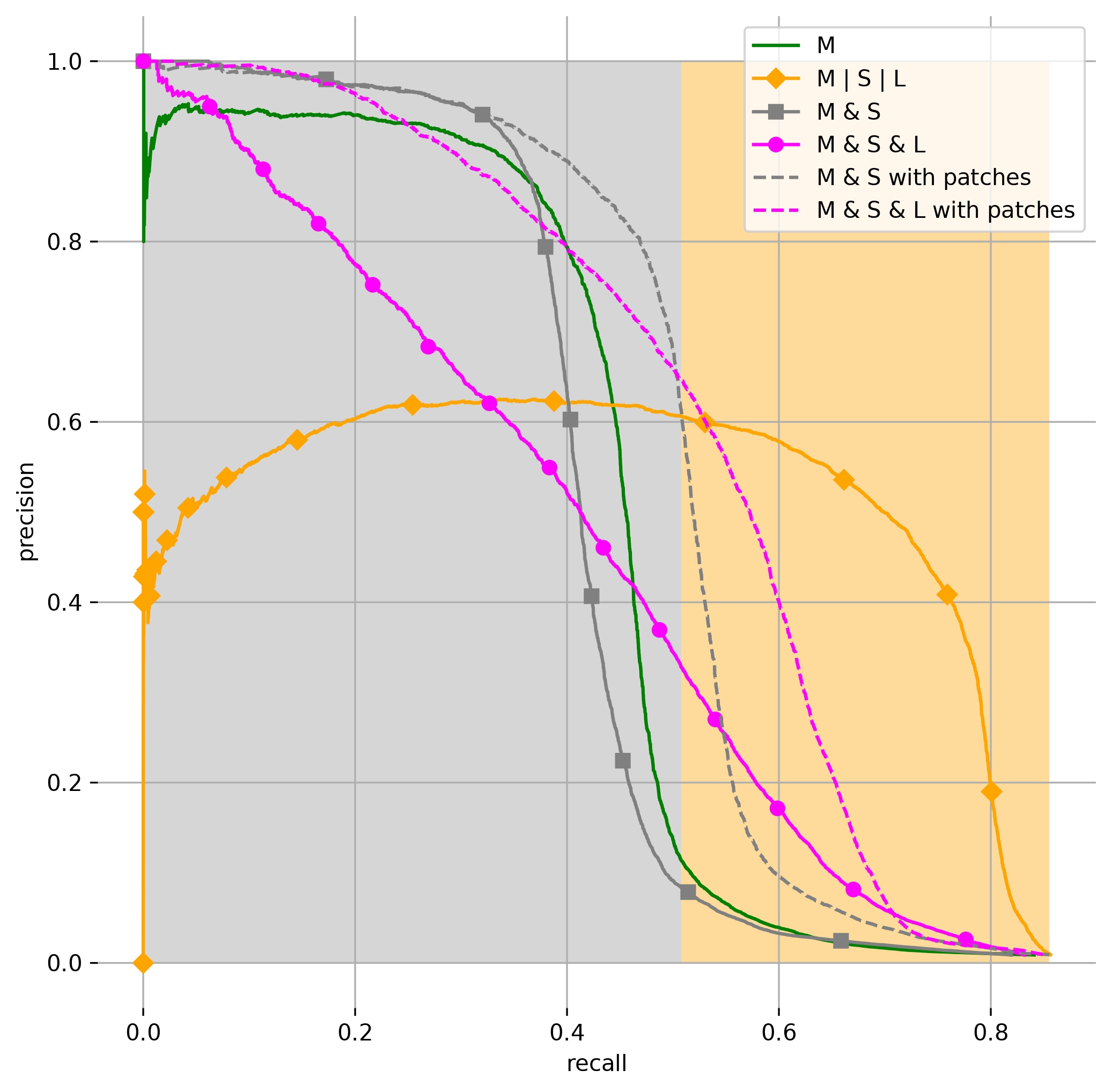
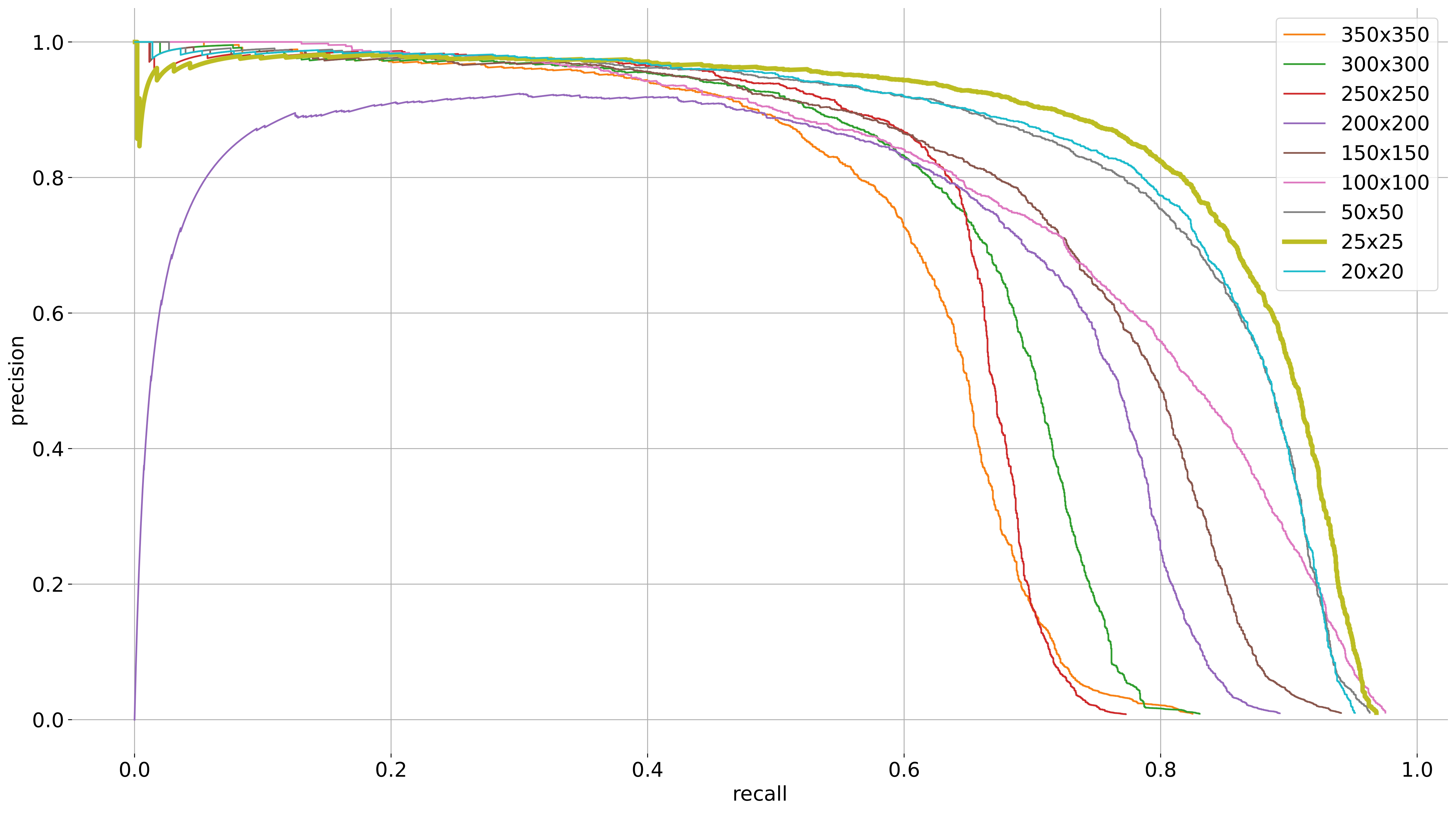
Precision-Recall curve
Map-based pole base detection learning
- Training set: 5391 images
- Validation set: 2830 images manually annotated
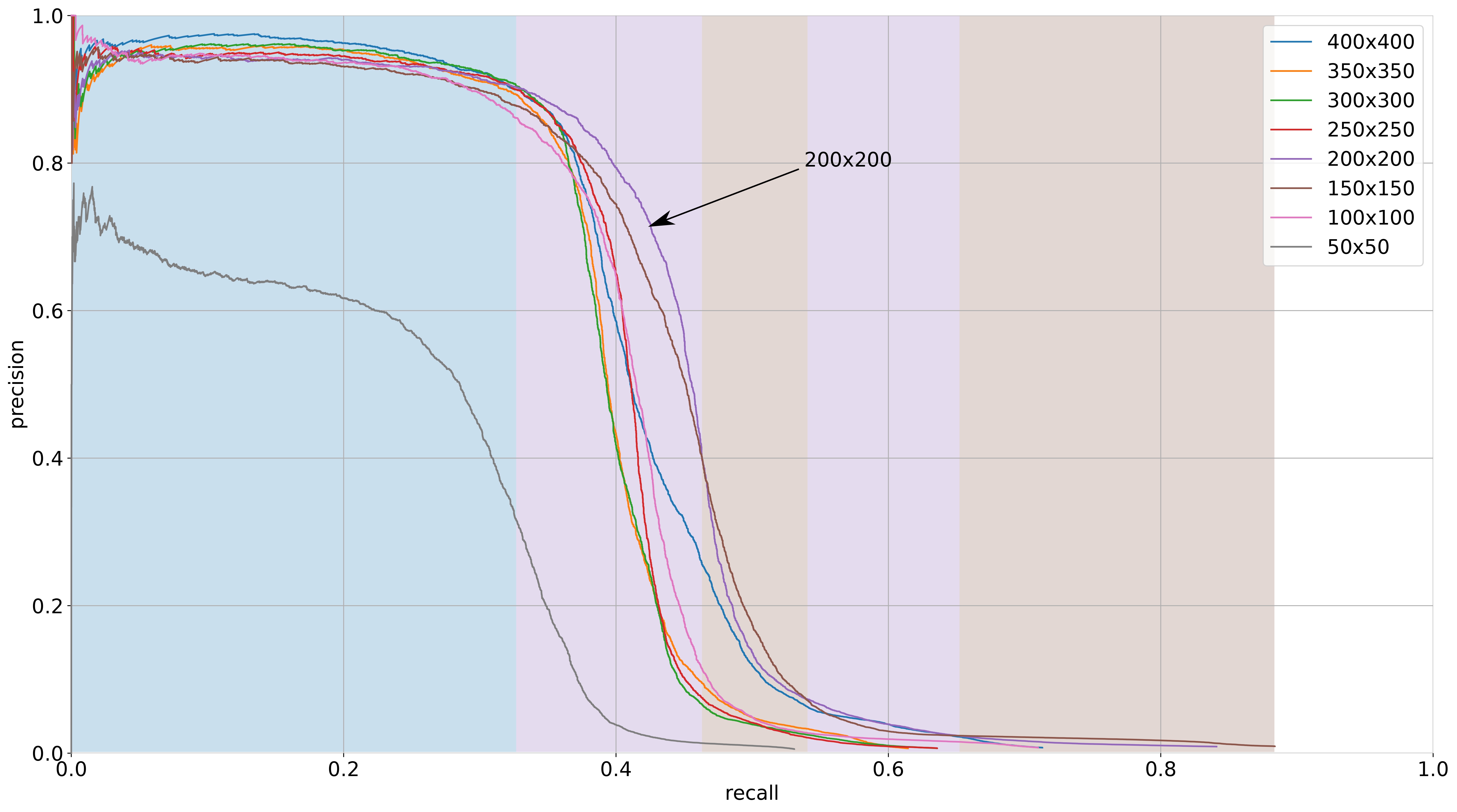
| Box | 50x50 | 100x100 | 150x150 | 200x200 | 250x250 | 300x300 | 350x350 | 400x400 |
|---|---|---|---|---|---|---|---|---|
| AP % | 21.2 | 39.2 | 42.5 | 43.2 | 38.9 | 38.3 | 38.4 | 41.3 |
| MAE-x (px) | 4.01 | 5.84 | 8.90 | 10.84 | 11.76 | 14.97 | 18.2 | 24.30 |
Multi-modal automatic annotation method for learning
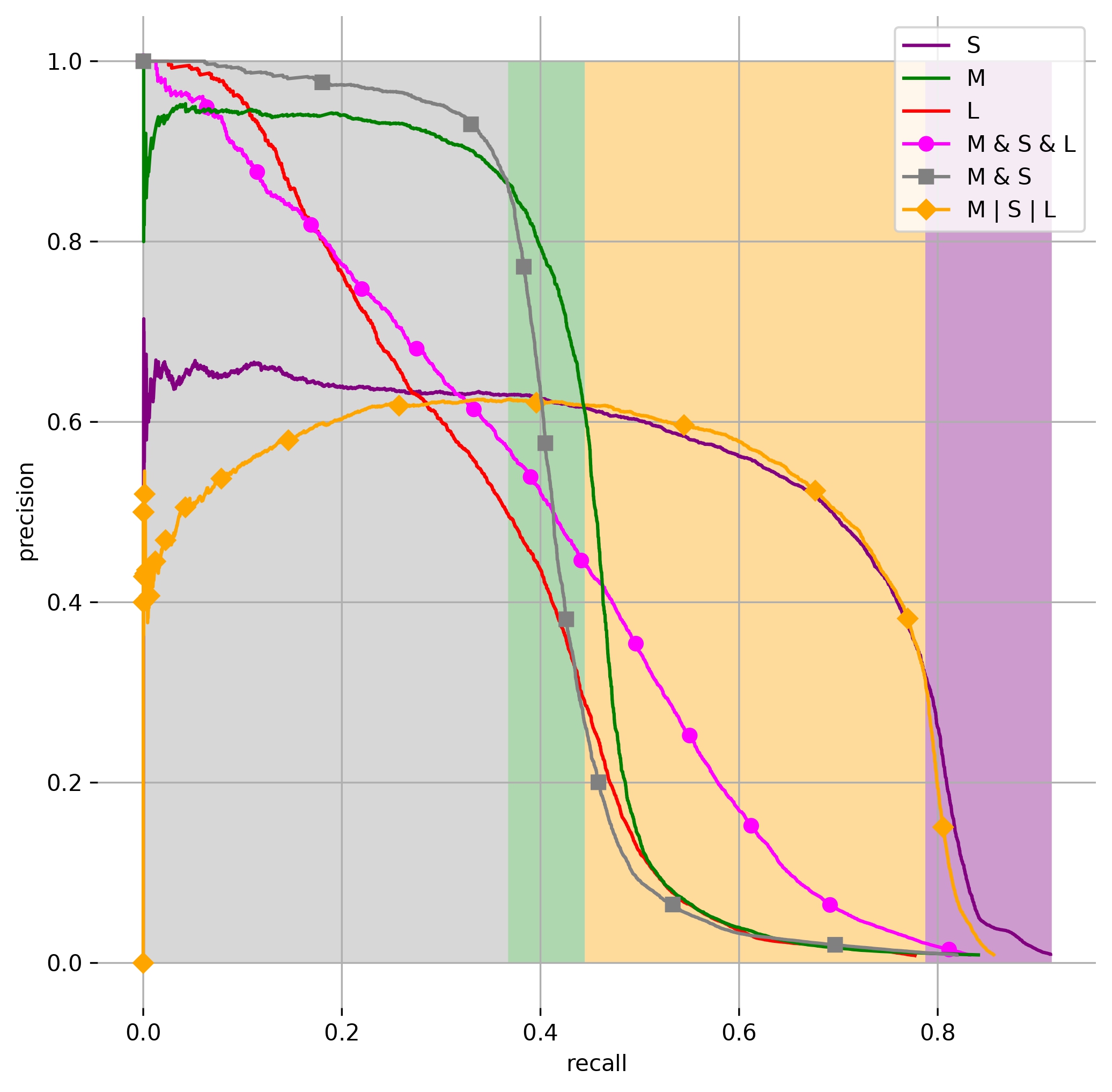
Uncertainty management
- Annotations used for training: Intersection of annotation sets
- Ambiguous cases: Union of annotation sets
Learning with uncertainty management
Available detectors
.jpg)
.jpg)
.jpg)
- Integration to a GNSS + Dead Reckoning sensors system
- Combinations: F and All
| Model | M95 | MS95 | M90 | MS90 |
|---|---|---|---|---|
| Precision (%) | 95 | 95 | 90 | 90 |
| Recall (%) | 4.3 | 30.4 | 33.3 | 38.5 |
Pole-based localization
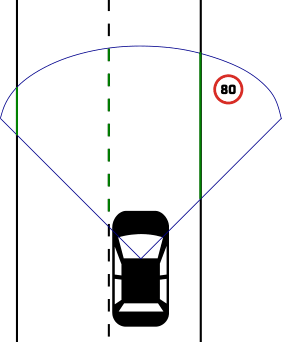
- Camera observations
- Lack of depth → map features projected into camera frame
- Use angles for observations and map features in camera frame
- Pose and calibration errors impact
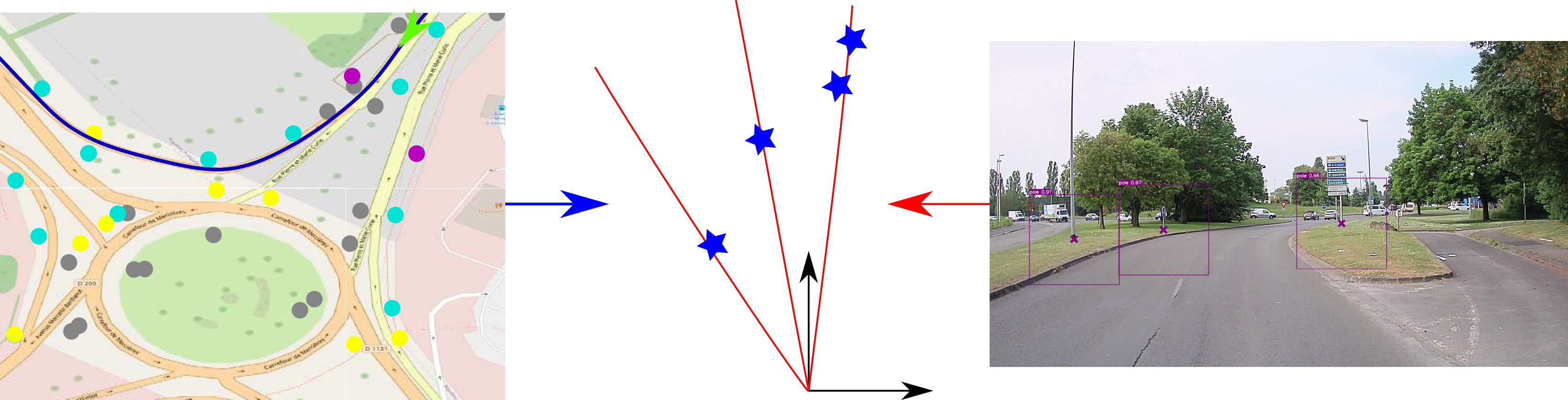
Data association
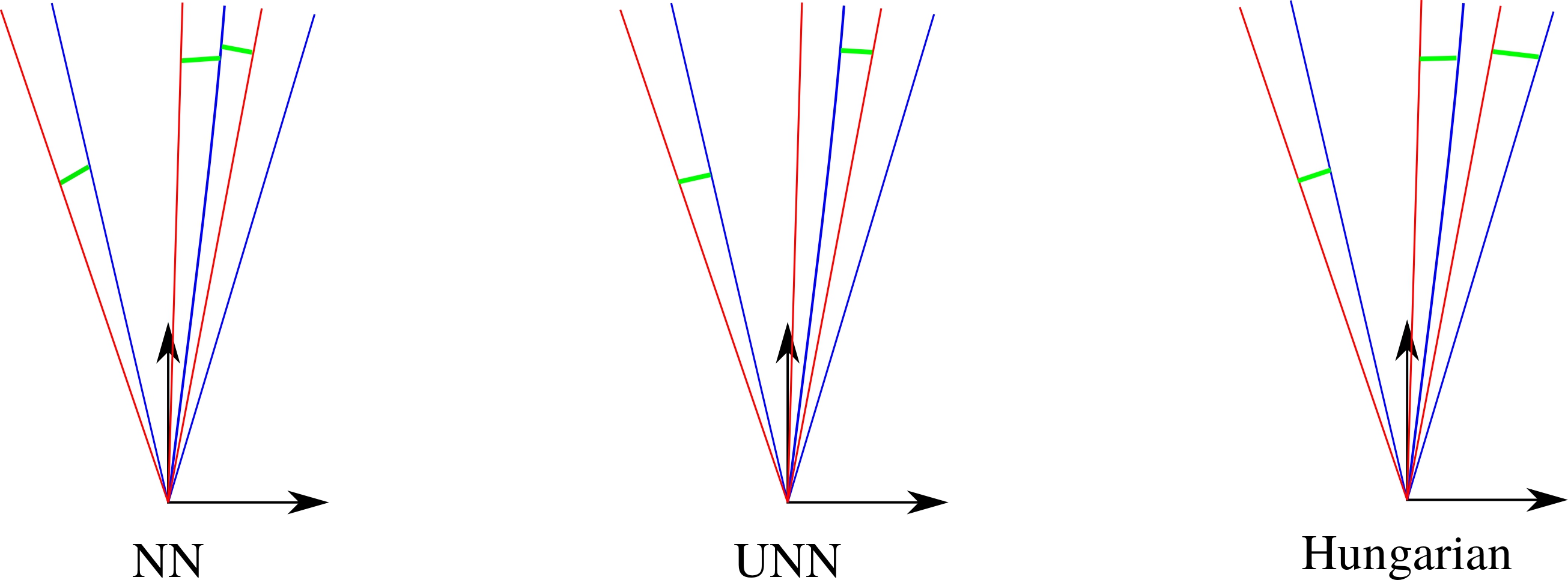
- Avoid wrong associations: gating
- Hungarian chosen
Nominal scenario
- Extended Kalman Filter
- Dead reckoning: 4-wheel speed + yaw rate model
- GNSS: SPP pose estimation
- Tightly-coupled cameras
- 50Hz pose estimation frequency
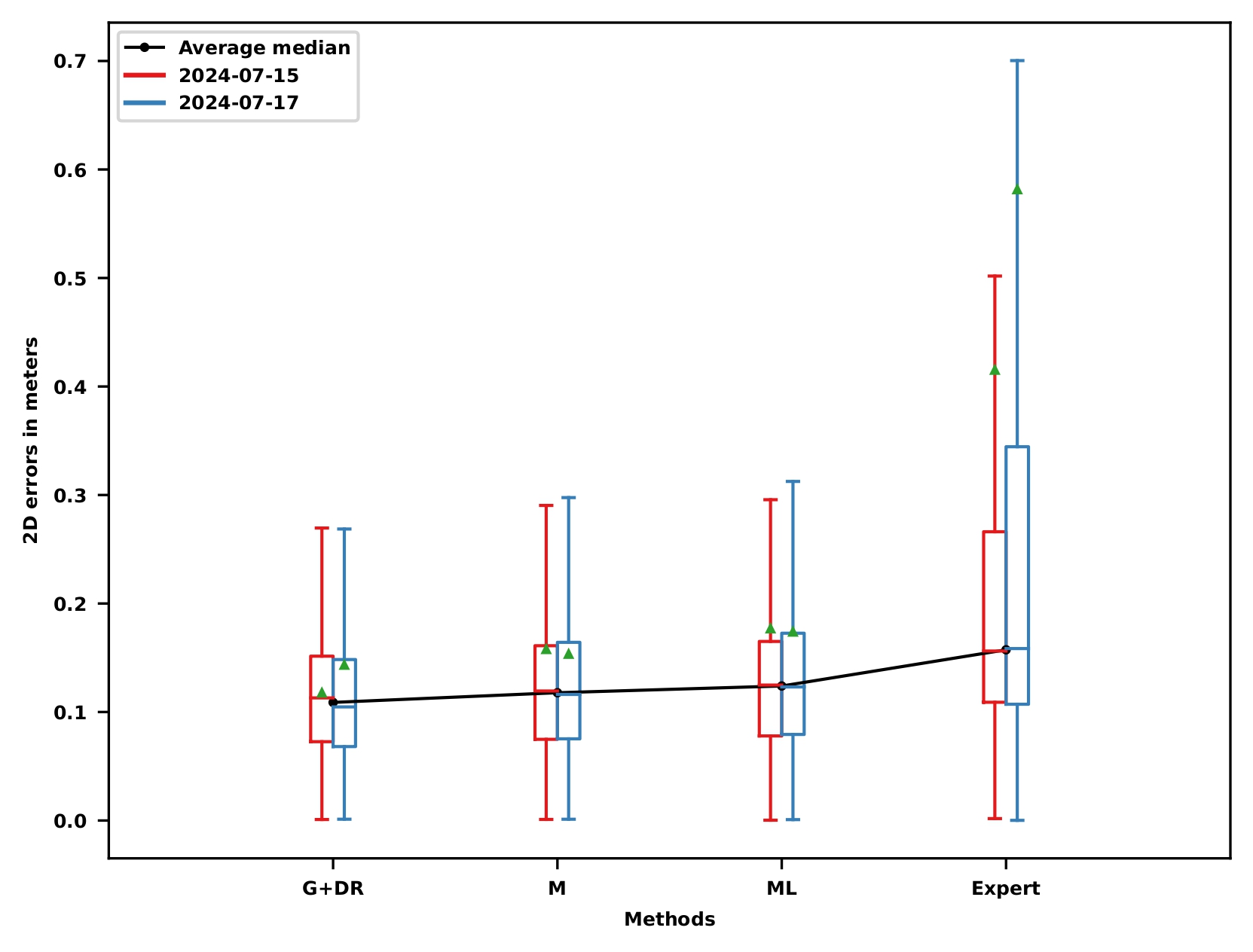
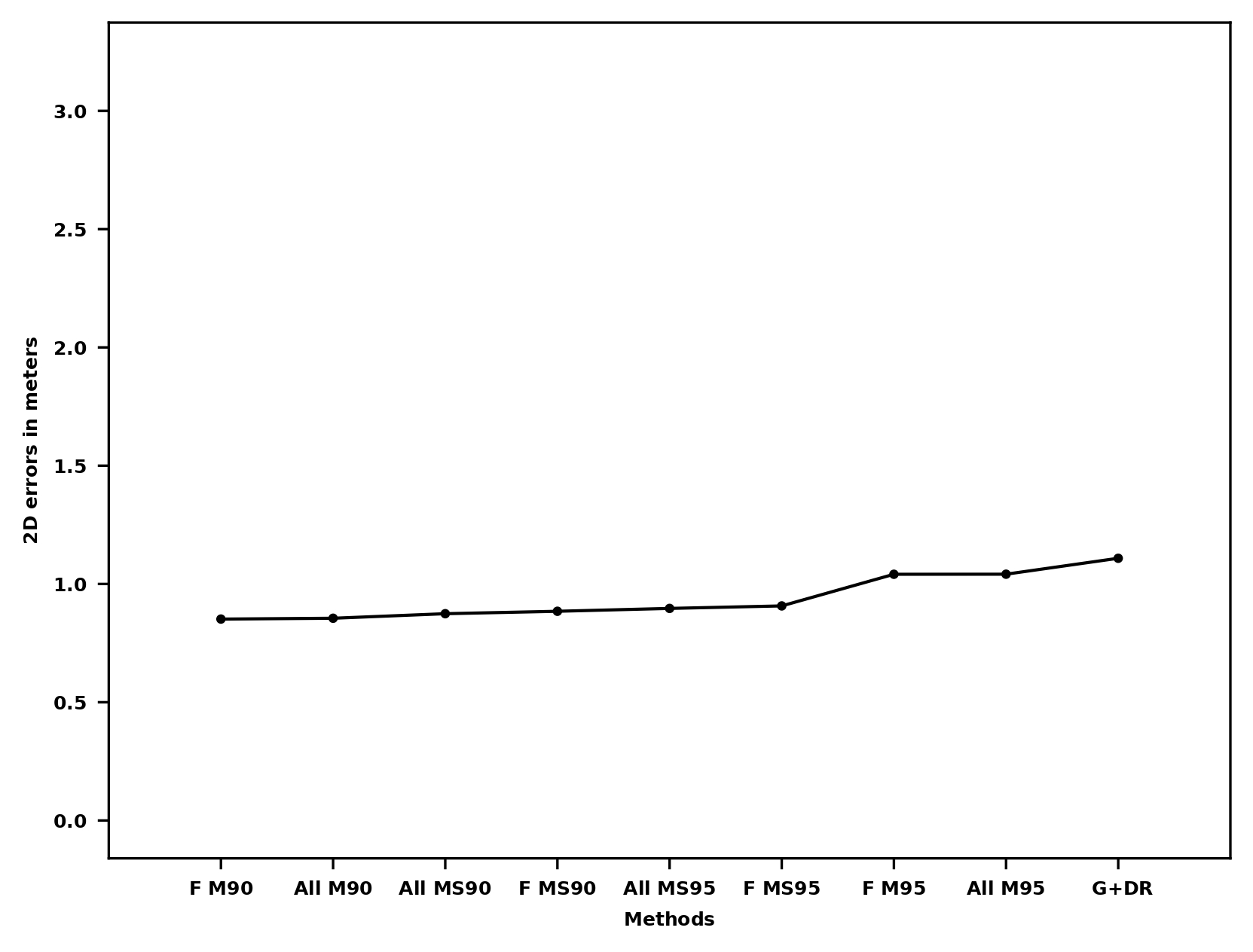
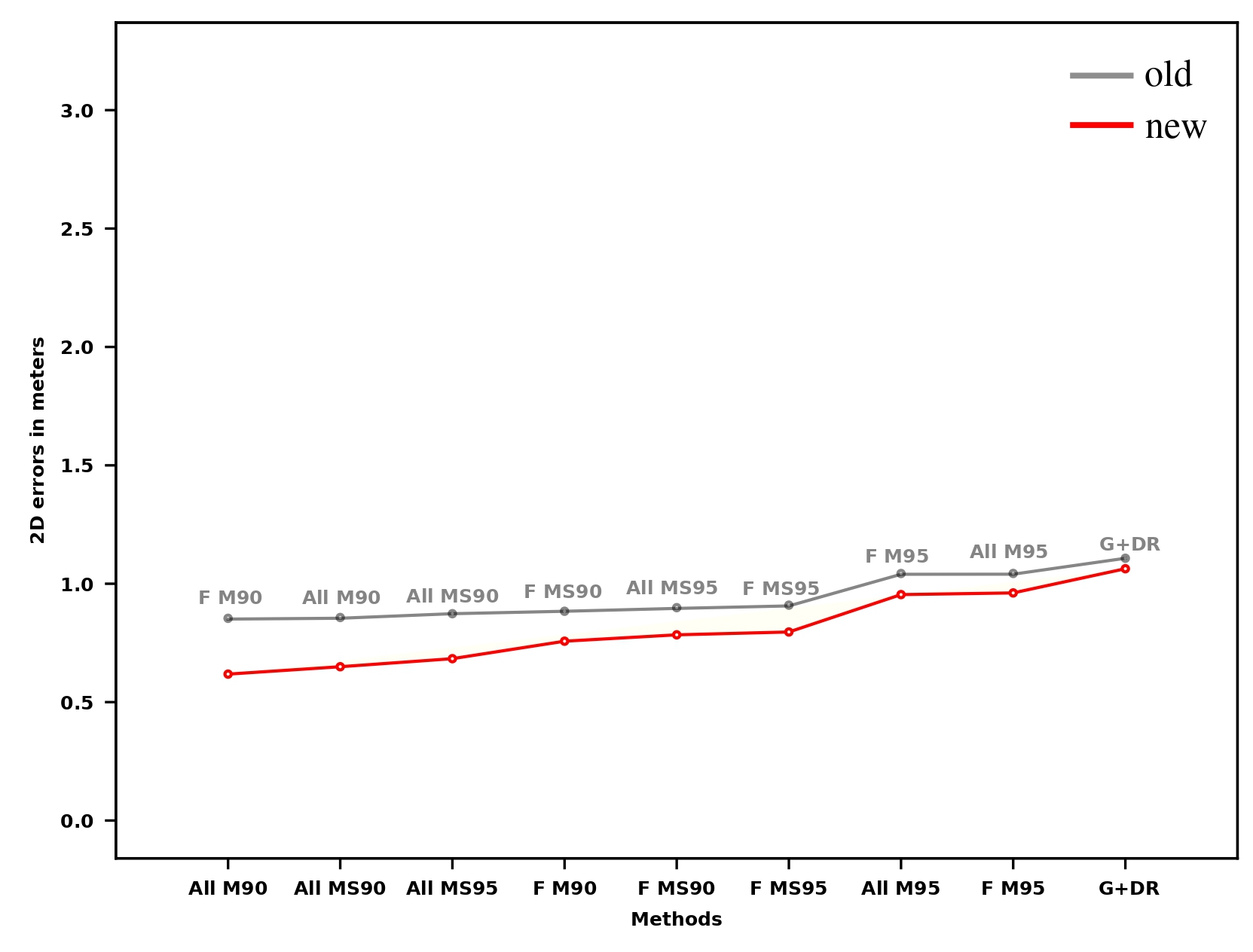
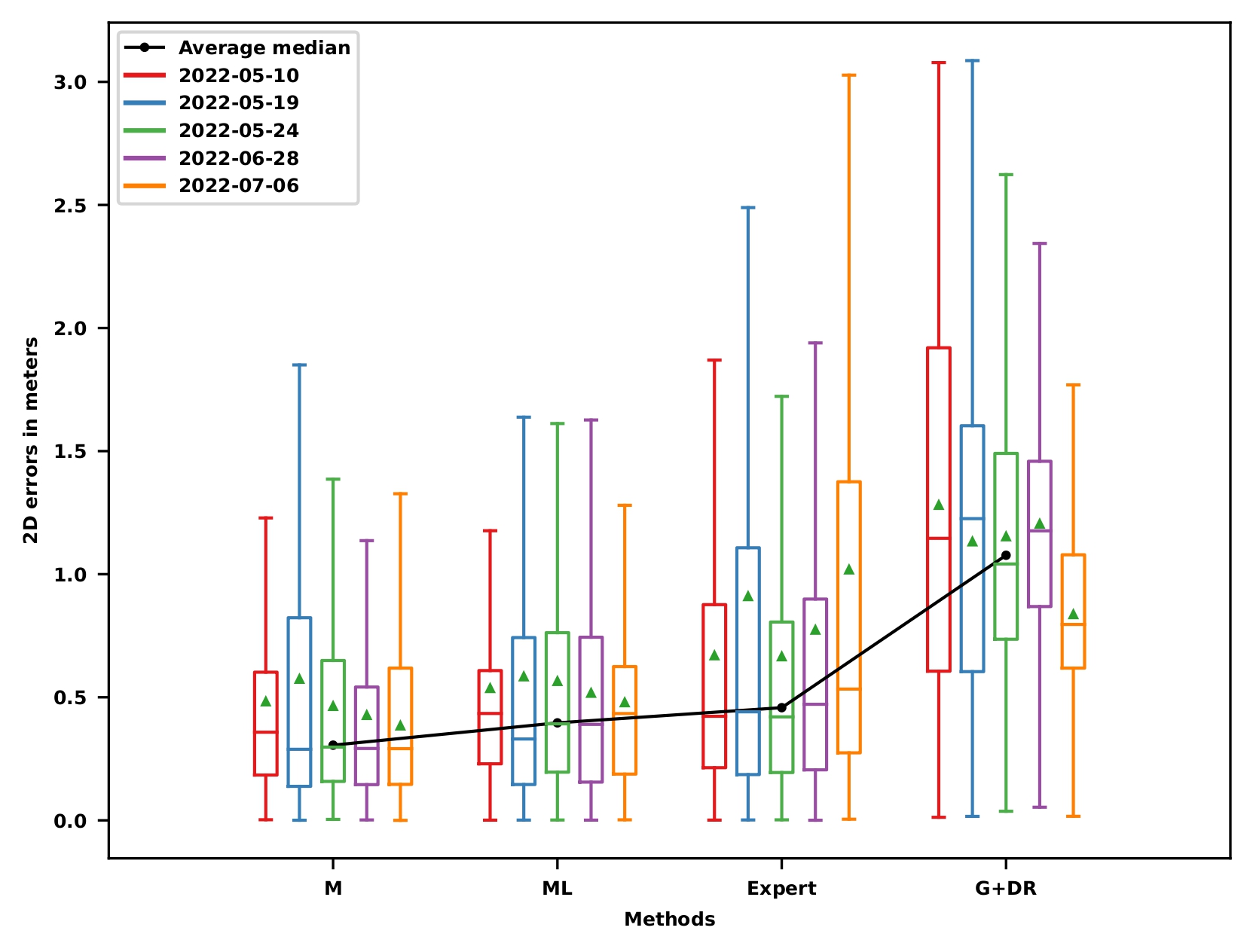
Localization results
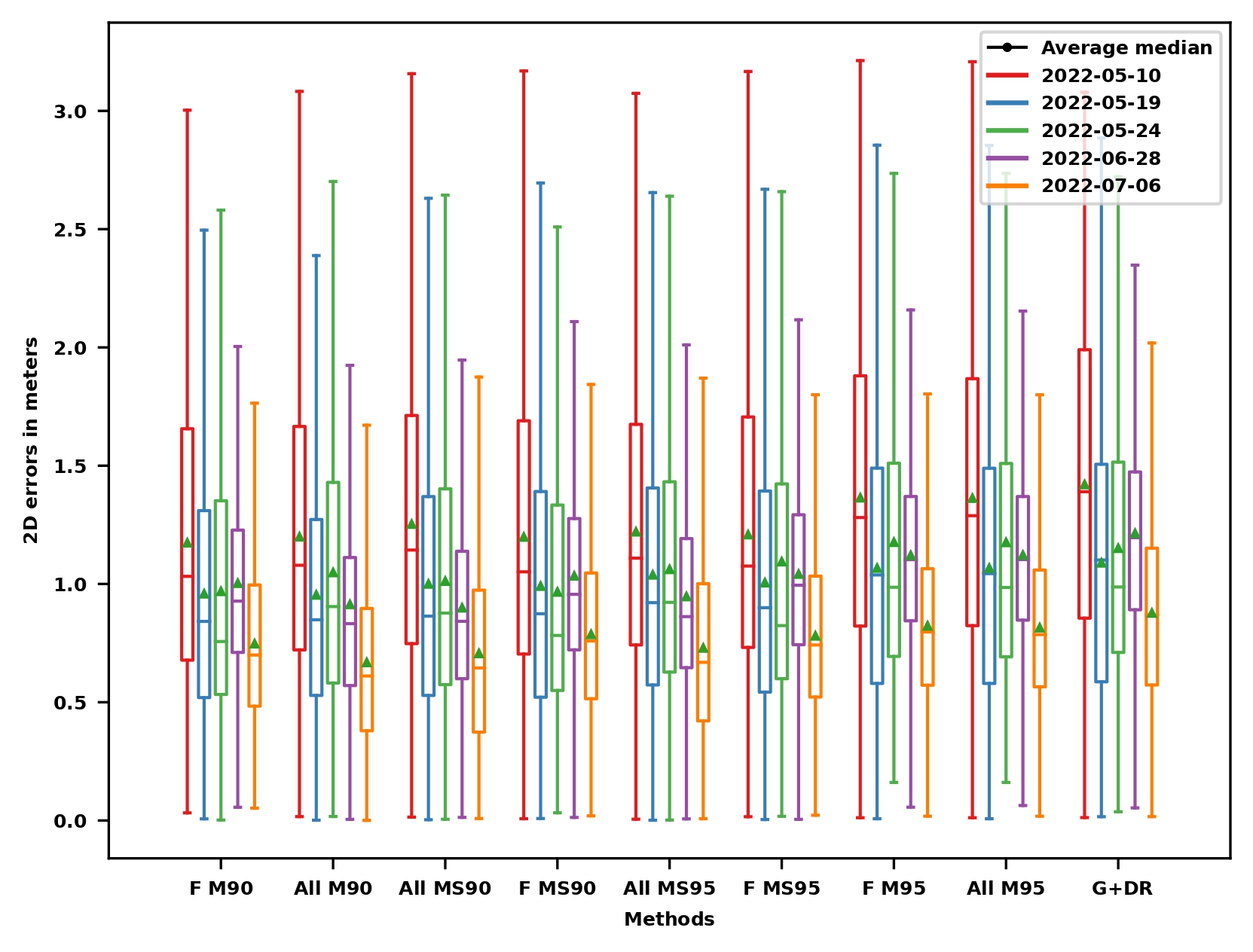
Localization results
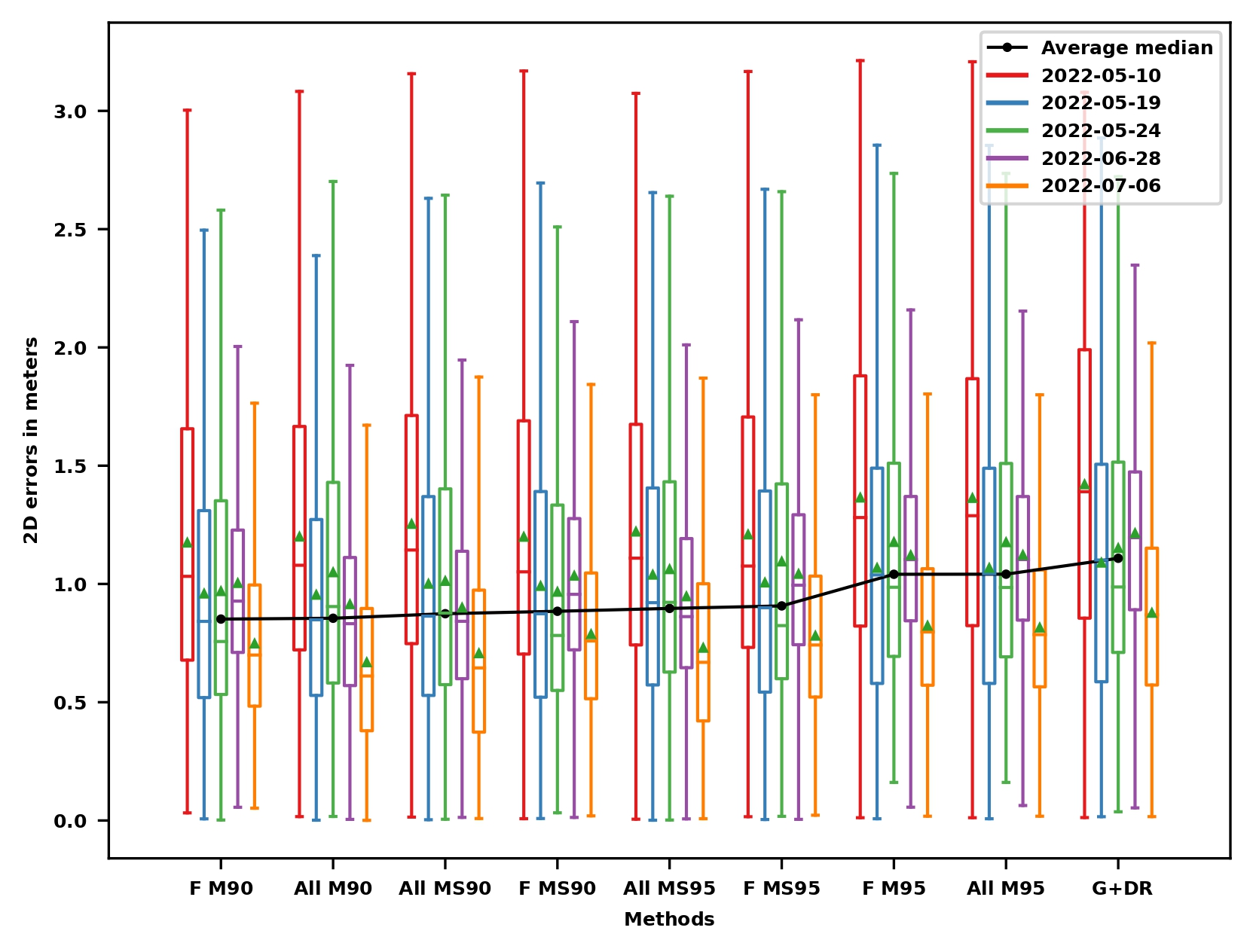
Localization results
Performance limitations
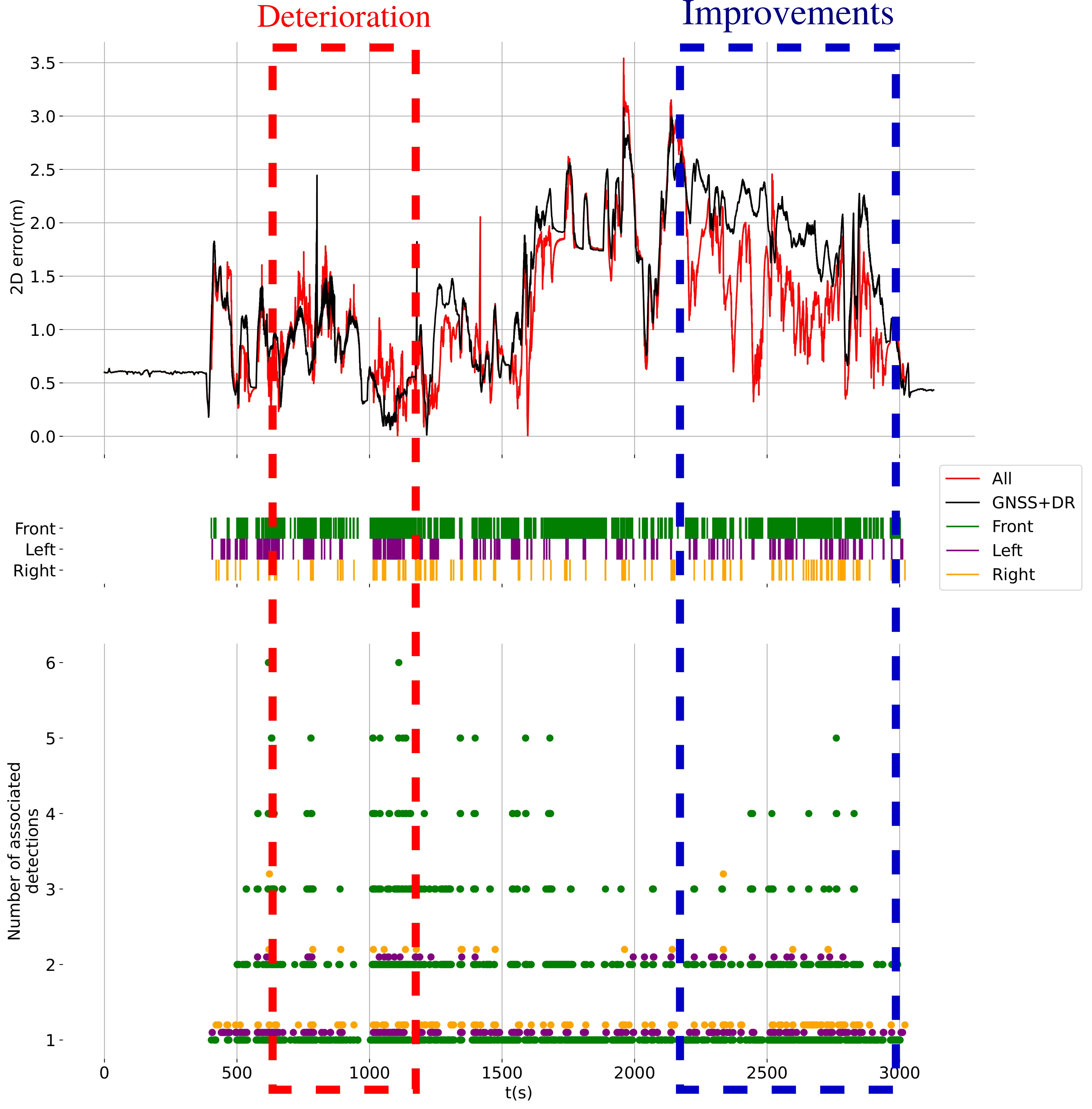
Better prior pose for data association improvements
Learning on manually annotated data
- Higher recall reachable
- Optimal box size: 25x25
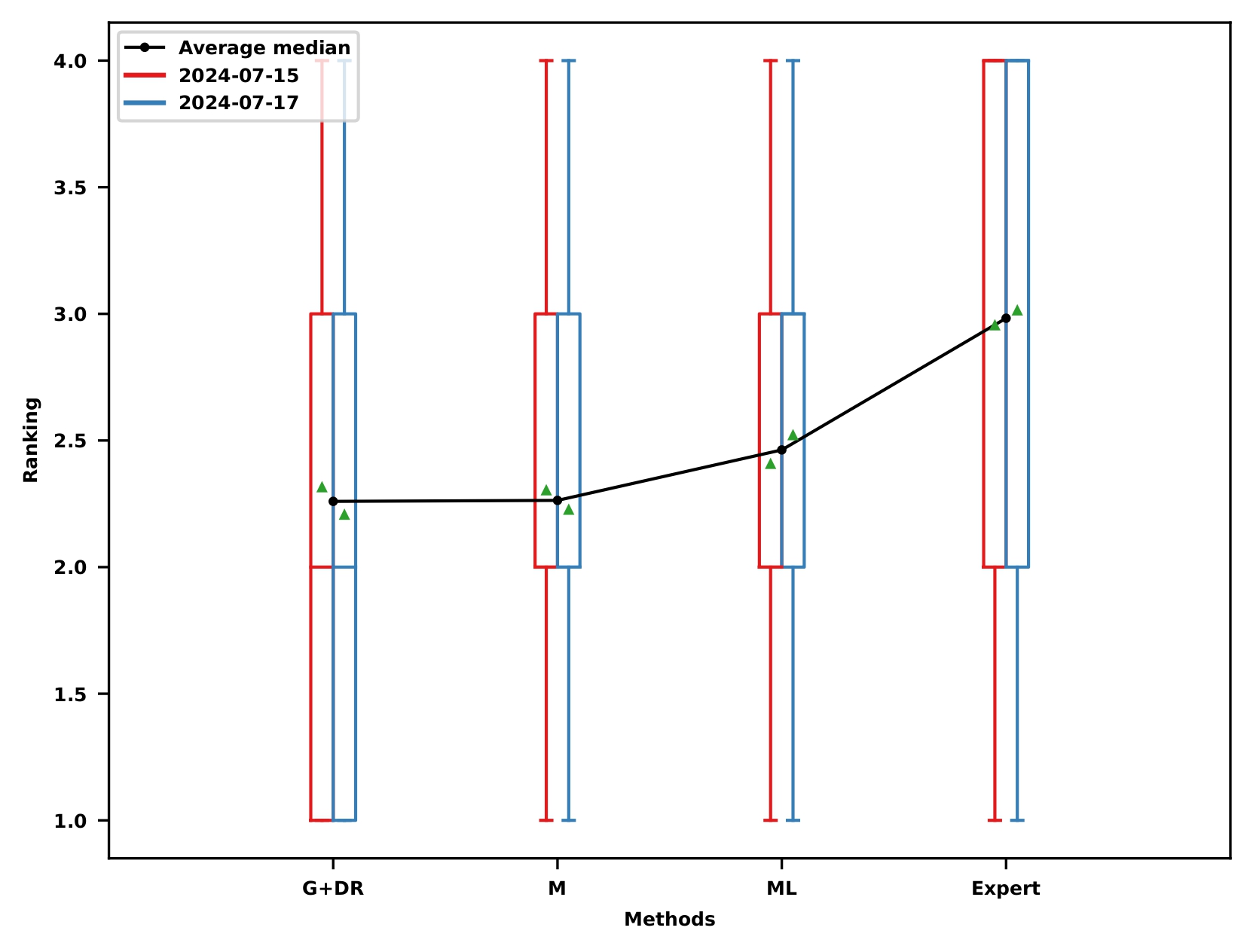
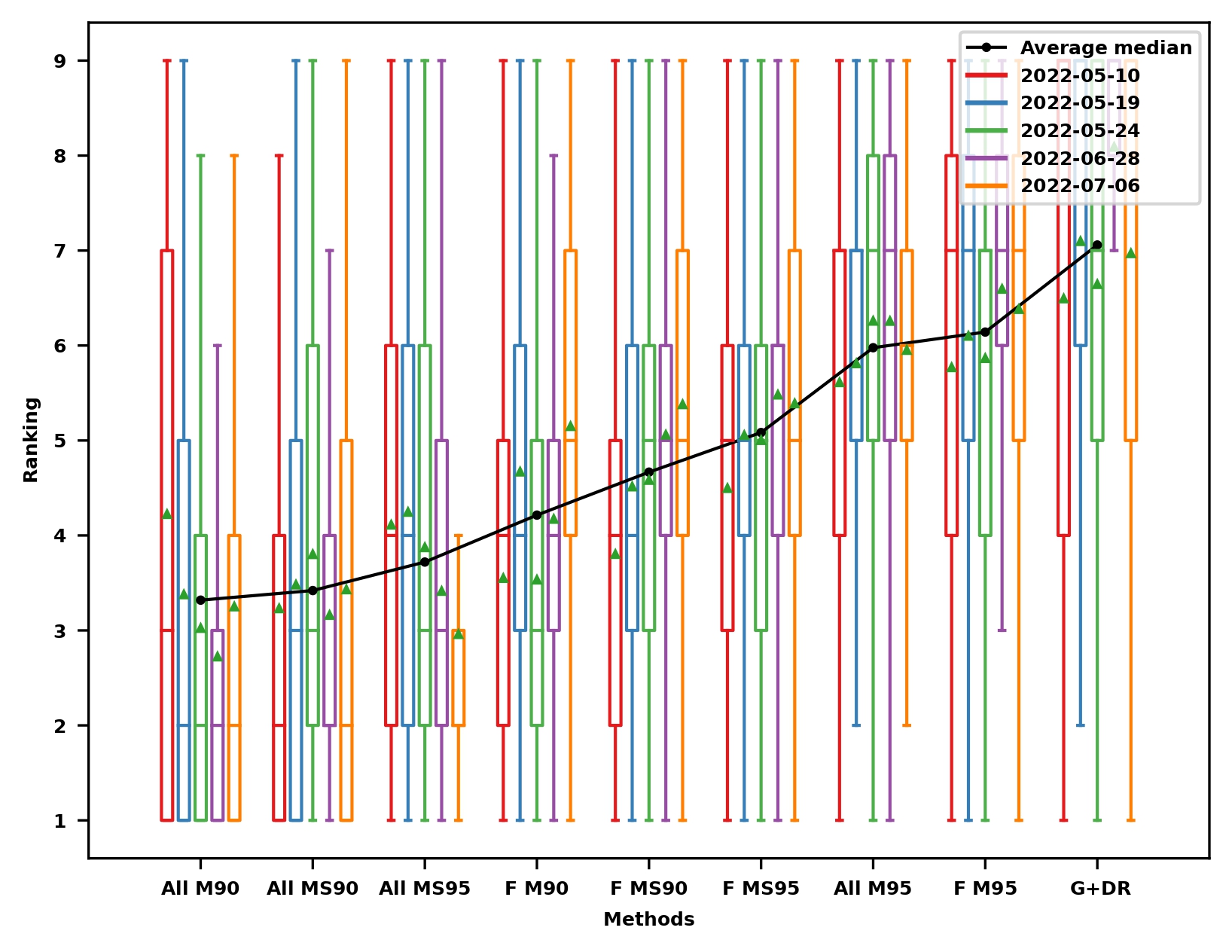
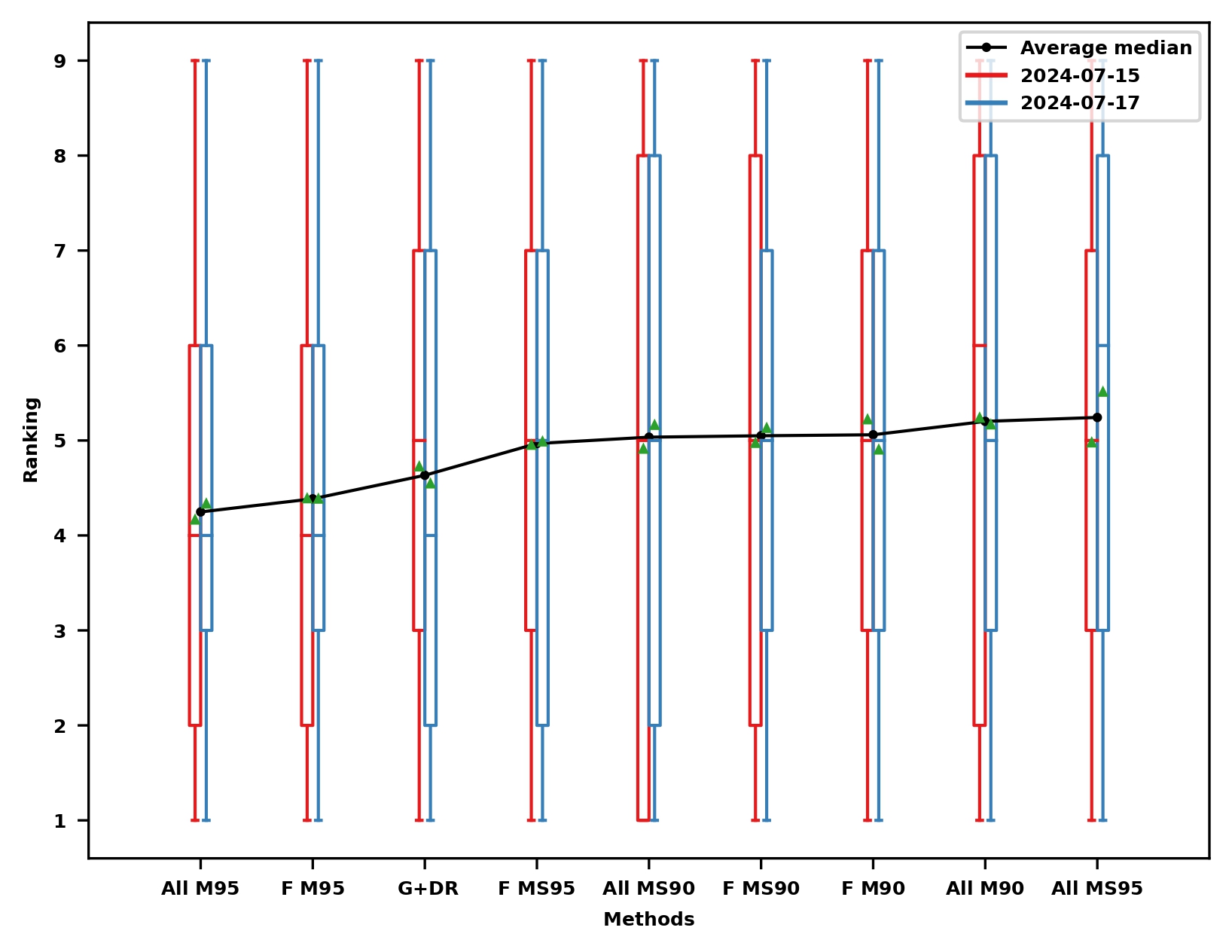
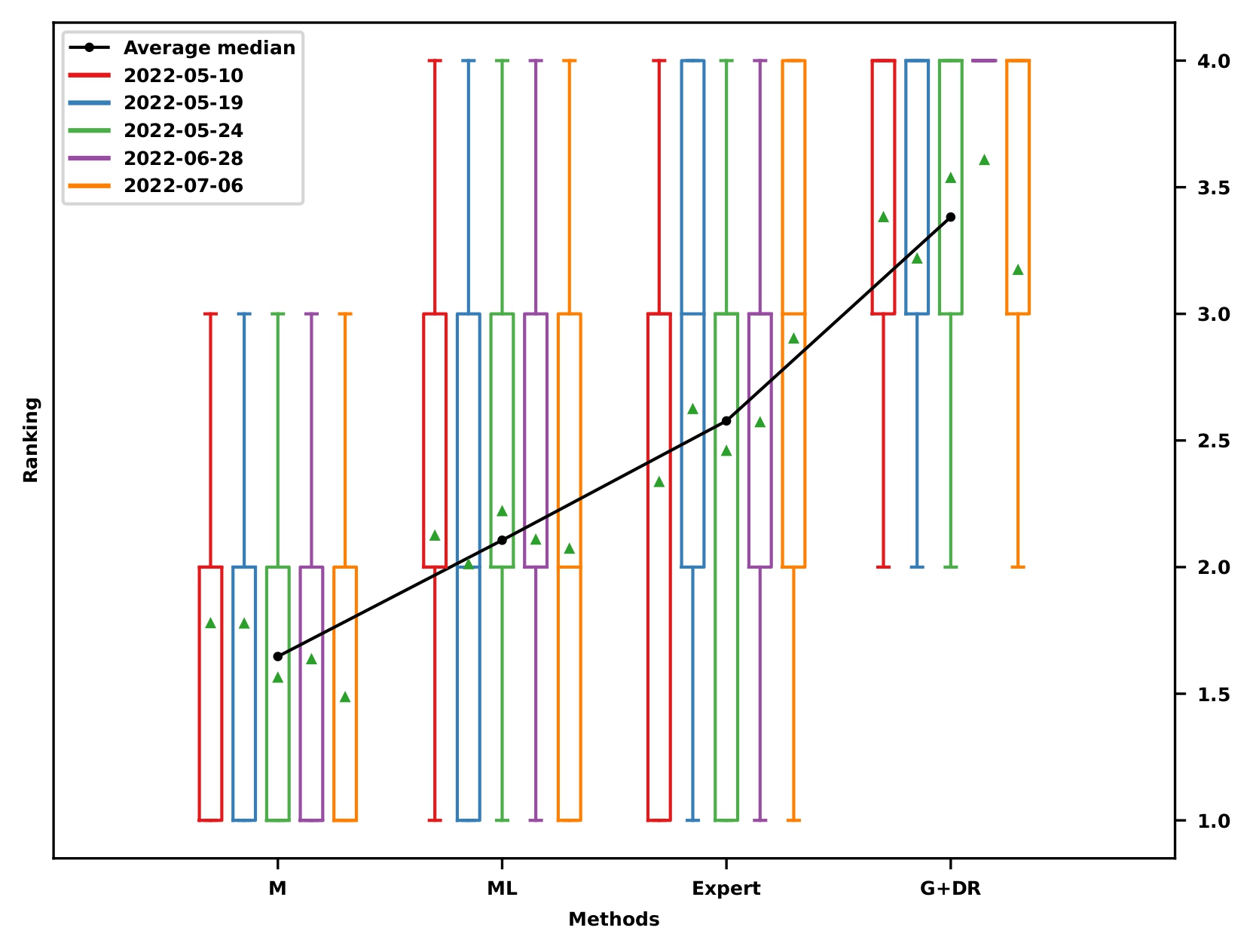
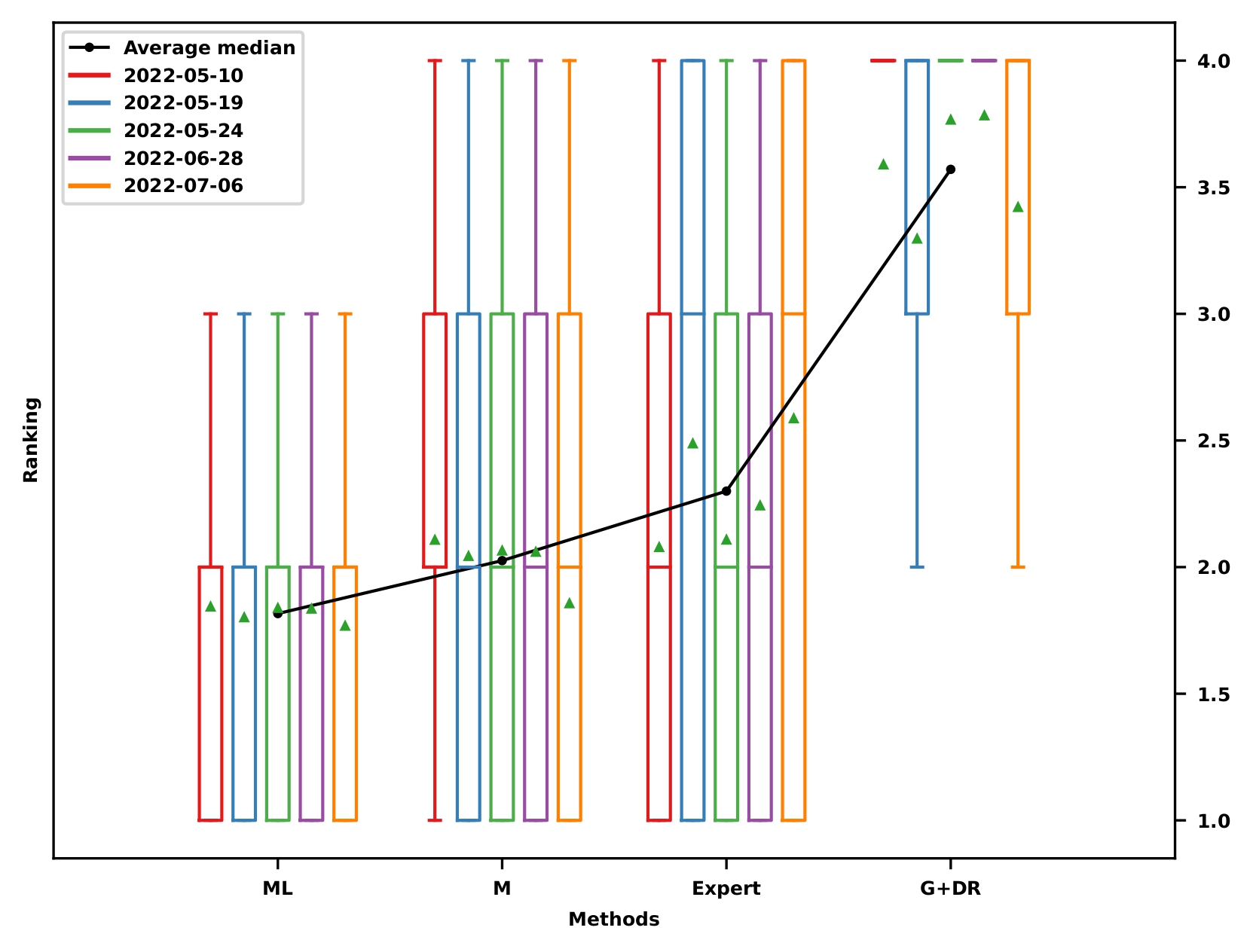
Localization results: Ranking
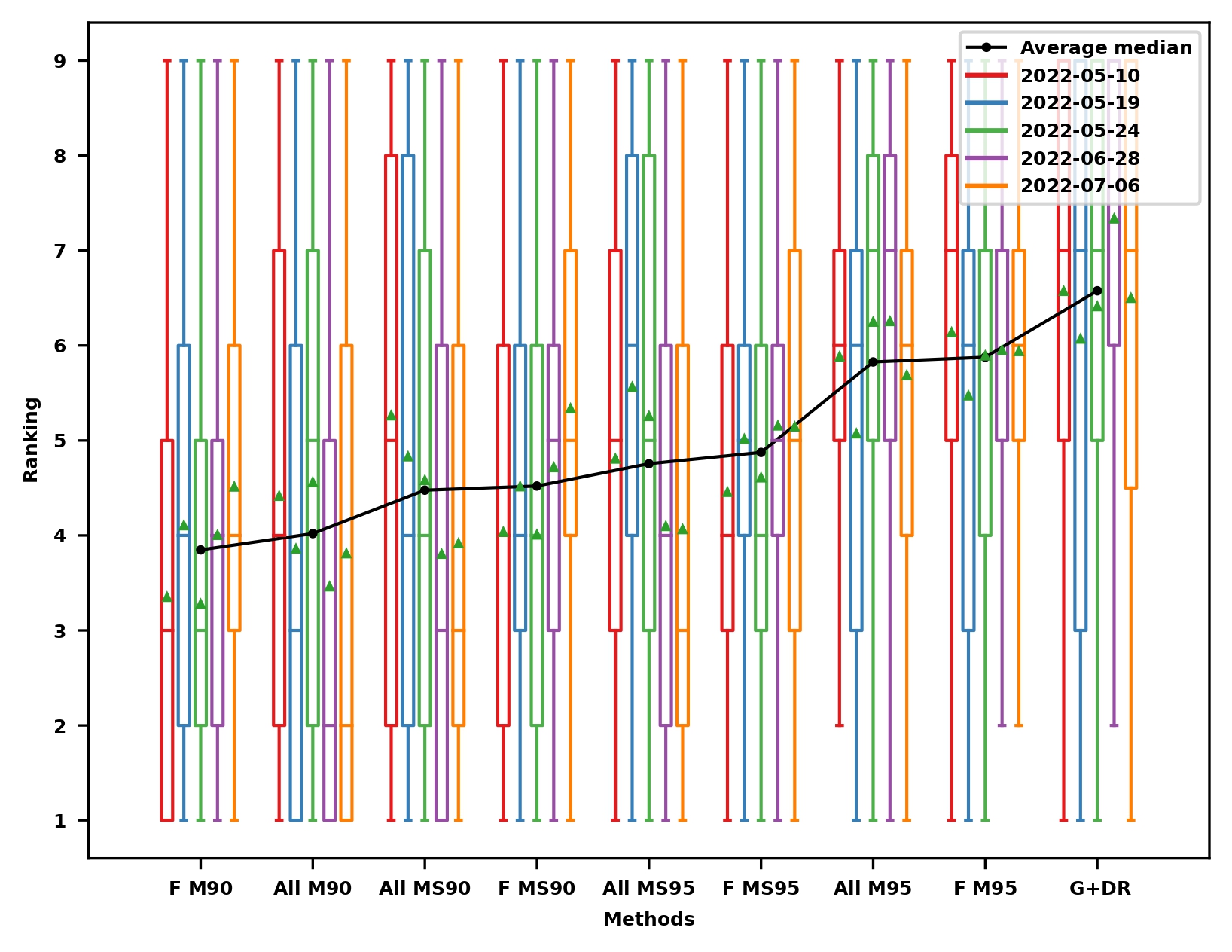
Localization reference for data association: Ranking
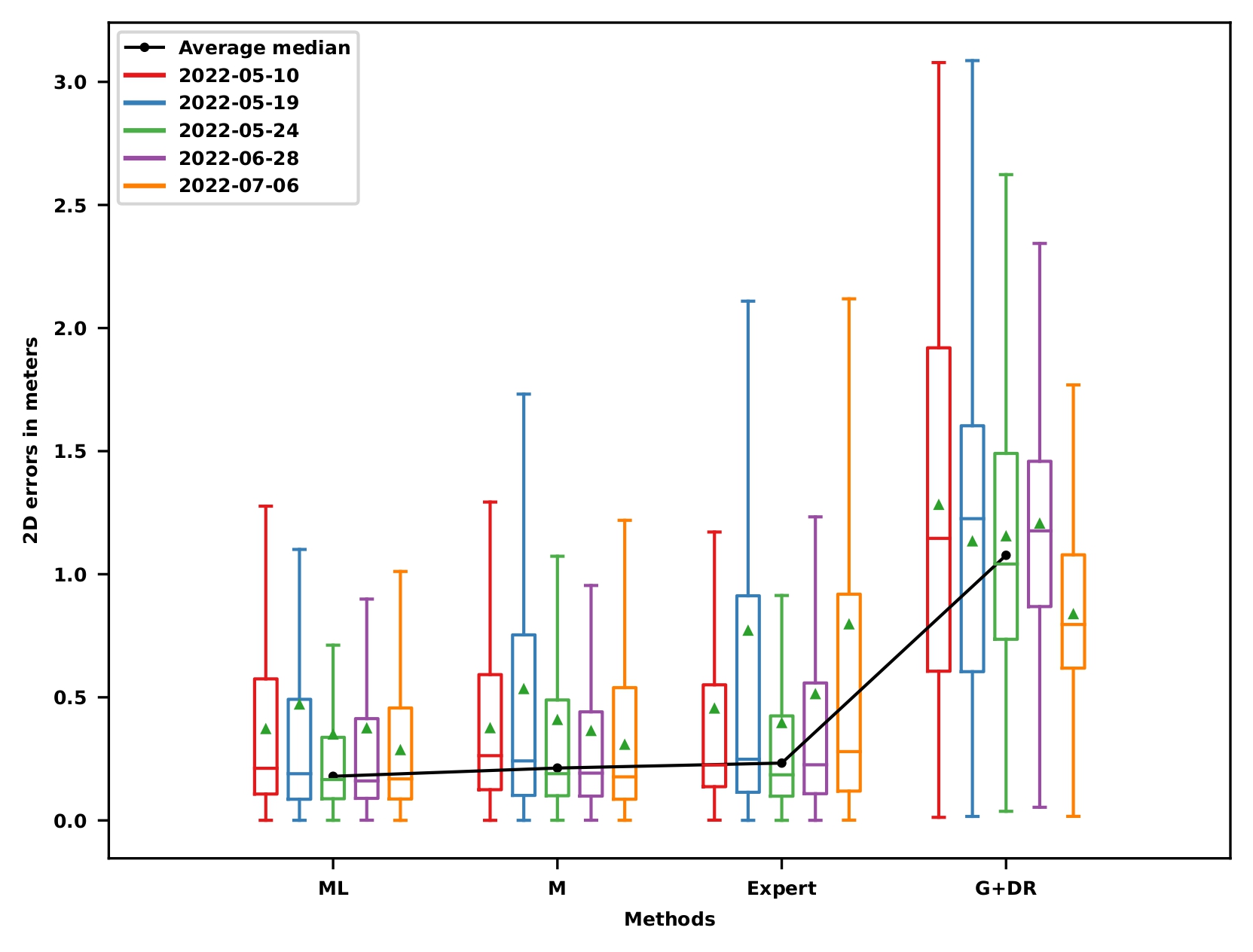
Results with PPP-RTK
Lidar: Map-based annotation
- Data association between map points and clusters
Lidar: Lidar-based annotation
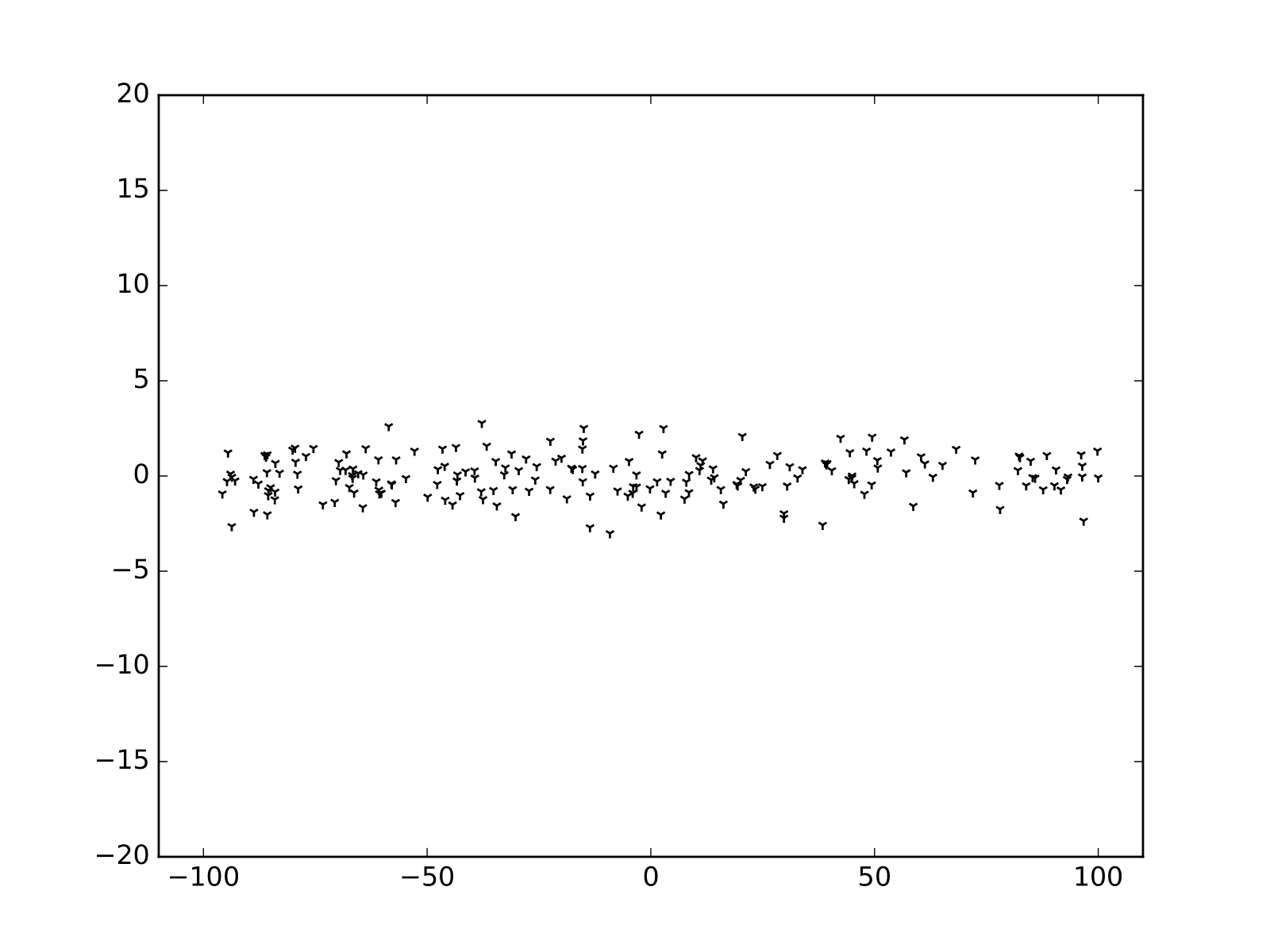
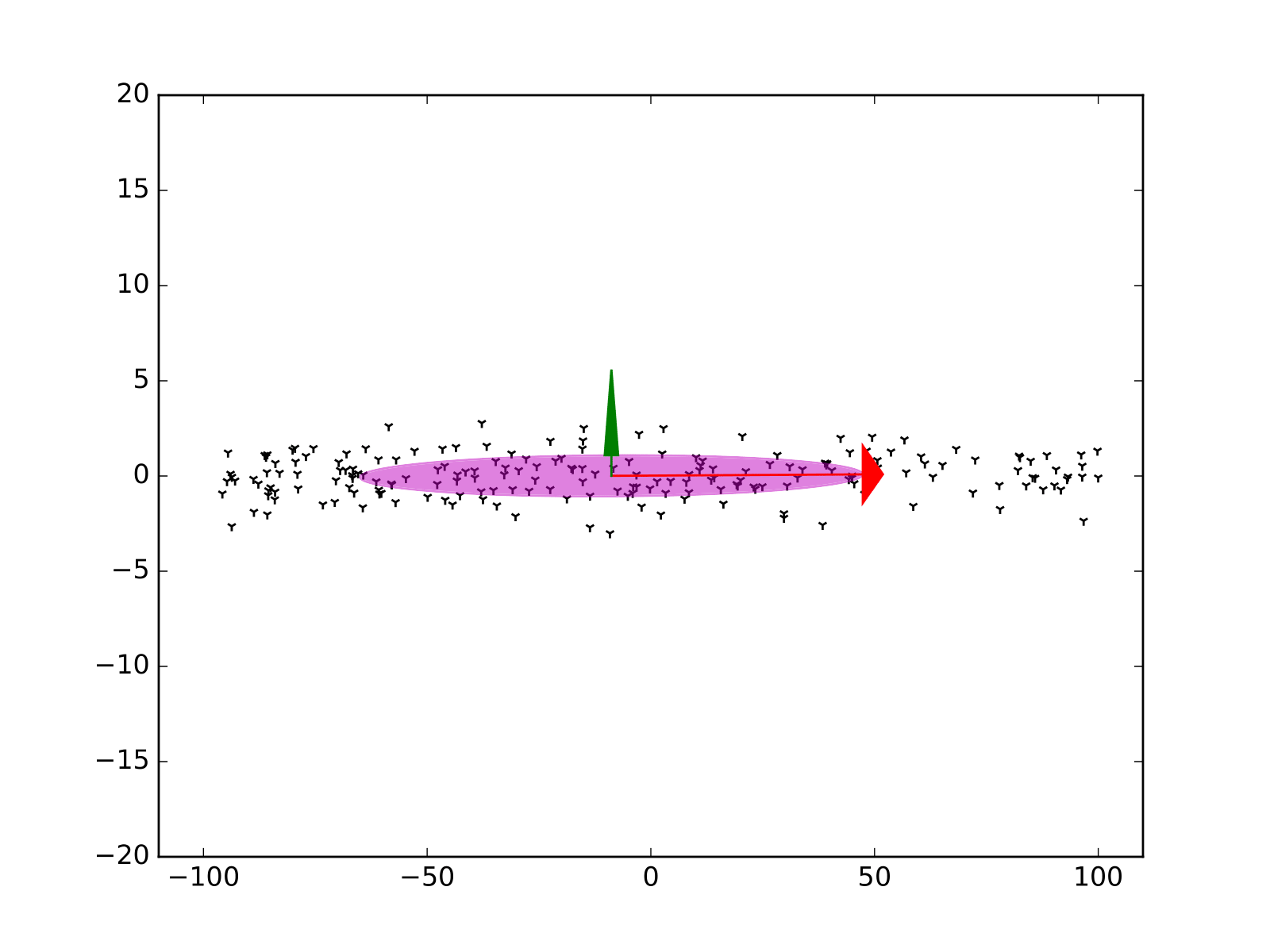
Lidar: Principal Component Analysis (PCA)
Points \[ X = \begin{pmatrix} x_0 & x_1 & \dots & x_N \\ y_0 & y_1 & \dots & y_N \end{pmatrix} \]
Mean
\[ \bar{X} = \begin{pmatrix} \bar{x} \\ \bar{y} \end{pmatrix} \]
Lidar: PCA - Covariance matrix
\[ Cov = \frac{ \left(X - \bar{X}\right) \cdot \left( X - \bar{X} \right)^T }{ N - 1 } \]
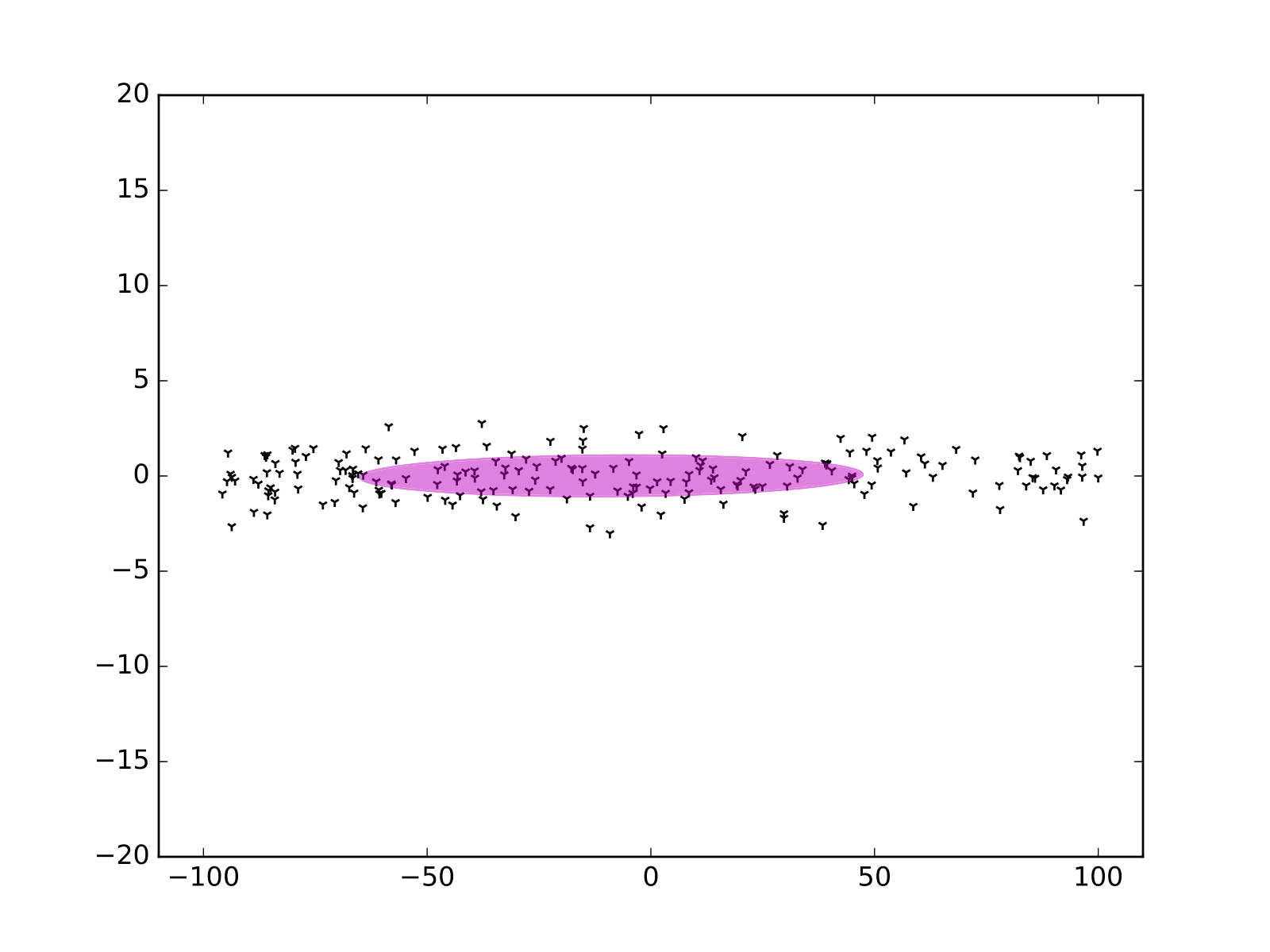
Lidar: PCA - Eigenvectors and eigenvalues
\[ Cov = Q \cdot \Gamma \cdot Q^{-1} \]
\[ Q = \begin{pmatrix} \color{red}{v_1^x} & \color{green}{v_2^x} \\ \color{red}{v_1^y} & \color{green}{v_2^y} \end{pmatrix} \]
\[ \Gamma = \begin{pmatrix} \color{red}{\sigma_1^2} & 0 \\ 0 & \color{green}{\sigma_2^2} \end{pmatrix} \]
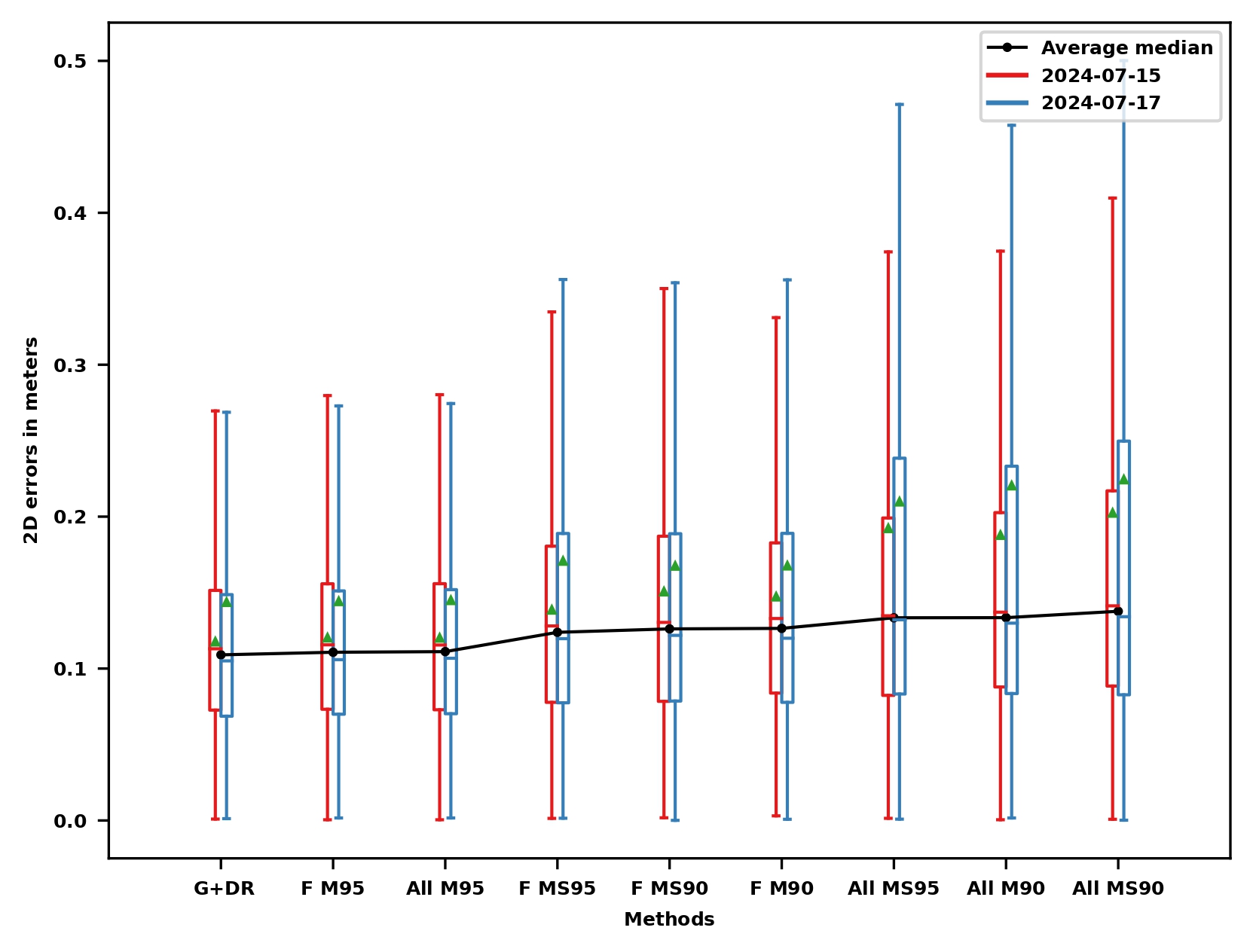
Lidar: localization results
Lidar with motion compensation: localization results
Lidar with motion compensation: Results with PPP-RTK